 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterleaving Scheduling and Motion Planning with Incremental Learning of Symbolic Space-Time Motion Abstractions
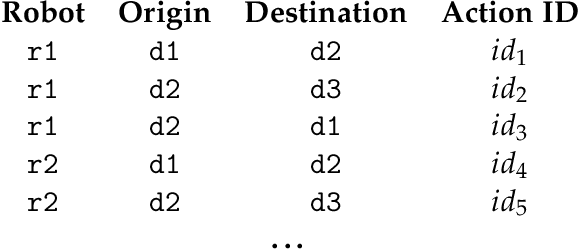
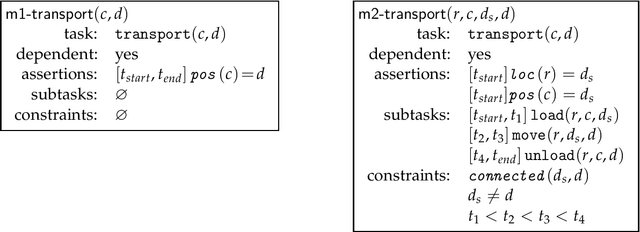
Mar 11, 2026Task and Motion Planning combines high-level task sequencing (what to do) with low-level motion planning (how to do it) to generate feasible, collision-free execution plans. However, in many real-world domains, such as automated warehouses, tasks are predefined, shifting the challenge to if, when, and how to execute them safely and efficiently under resource, time and motion constraints. In this paper, we formalize this as the Scheduling and Motion Planning problem for multi-object navigation in shared workspaces. We propose a novel solution framework that interleaves off-the-shelf schedulers and motion planners in an incremental learning loop. The scheduler generates candidate plans, while the motion planner checks feasibility and returns symbolic feedback, i.e., spatial conflicts and timing adjustments, to guide the scheduler towards motion-feasible solutions. We validate our proposal on logistics and job-shop scheduling benchmarks augmented with motion tasks, using state-of-the-art schedulers and sampling-based motion planners. Our results show the effectiveness of our framework in generating valid plans under complex temporal and spatial constraints, where synchronized motion is critical.
Multi-Robot Task Planning to Secure Human Group Progress
Oct 03, 2023Recent years have seen an increasing number of deployment of fleets of autonomous vehicles. As the problem scales up, in terms of autonomous vehicles number and complexity of their objectives, there is a growing need for decision-support tooling to help the operators in controlling the fleet. In this paper, we present an automated planning system developed to assist the operators in the CoHoMa II challenge, where a fleet of robots, remotely controlled by a handful of operators, must explore and progress through a potential hostile area. In this context, we use planning to provide the operators with suggestions about the actions to consider and their allocation to the robots. This paper especially focus on the modelling of the problem as a hierarchical planning problem for which we use a state-of-the-art automated solver.
* In Proceedings AREA 2023, arXiv:2310.00333
FAPE: a Constraint-based Planner for Generative and Hierarchical Temporal Planning
Oct 25, 2020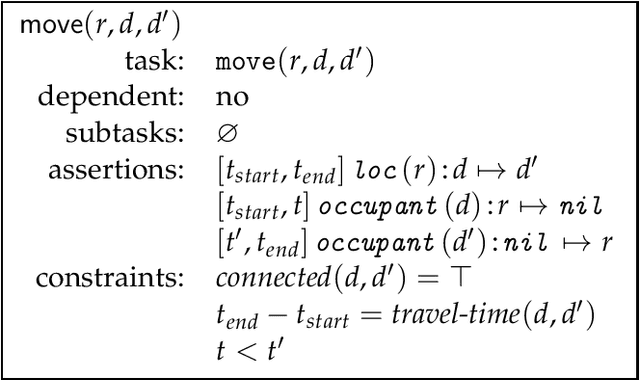
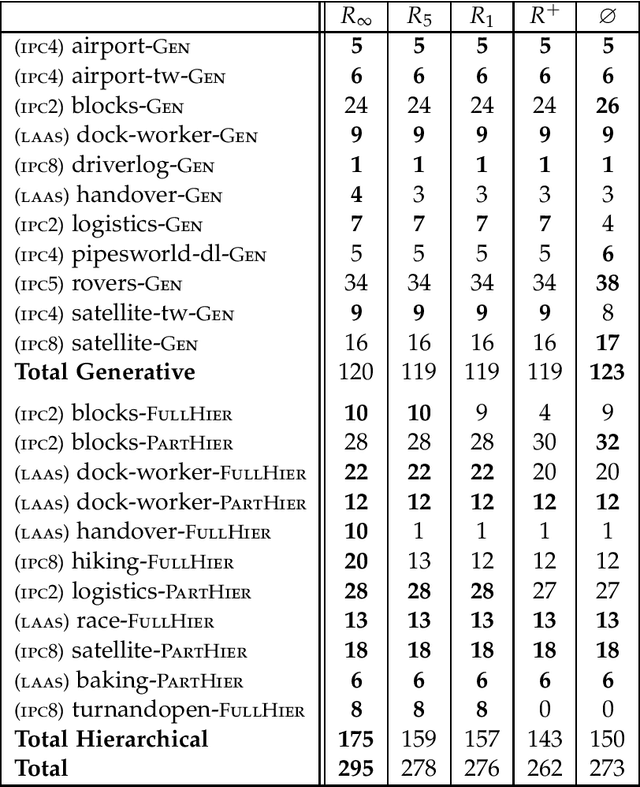
Temporal planning offers numerous advantages when based on an expressive representation. Timelines have been known to provide the required expressiveness but at the cost of search efficiency. We propose here a temporal planner, called FAPE, which supports many of the expressive temporal features of the ANML modeling language without loosing efficiency. FAPE's representation coherently integrates flexible timelines with hierarchical refinement methods that can provide efficient control knowledge. A novel reachability analysis technique is proposed and used to develop causal networks to constrain the search space. It is employed for the design of informed heuristics, inference methods and efficient search strategies. Experimental results on common benchmarks in the field permit to assess the components and search strategies of FAPE, and to compare it to IPC planners. The results show the proposed approach to be competitive with less expressive planners and often superior when hierarchical control knowledge is provided. FAPE, a freely available system, provides other features, not covered here, such as the integration of planning with acting, and the handling of sensing actions in partially observable environments.
A Constraint-based Encoding for Domain-Independent Temporal Planning
Jun 26, 2018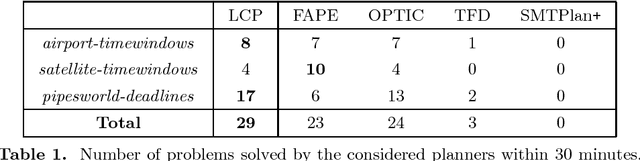
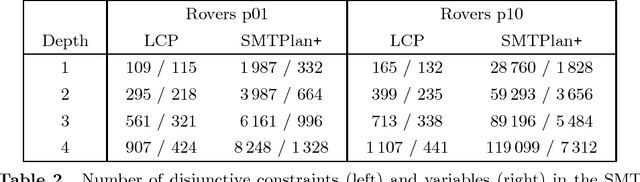
We present a general constraint-based encoding for domain-independent task planning. Task planning is characterized by causal relationships expressed as conditions and effects of optional actions. Possible actions are typically represented by templates, where each template can be instantiated into a number of primitive actions. While most previous work for domain-independent task planning has focused on primitive actions in a state-oriented view, our encoding uses a fully lifted representation at the level of action templates. It follows a time-oriented view in the spirit of previous work in constraint-based scheduling. As a result, the proposed encoding is simple and compact as it grows with the number of actions in a solution plan rather than the number of possible primitive actions. When solved with an SMT solver, we show that the proposed encoding is slightly more efficient than state-of-the-art methods on temporally constrained planning benchmarks while clearly outperforming other fully constraint-based approaches.
SMarTplan: a Task Planner for Smart Factories
Jun 19, 2018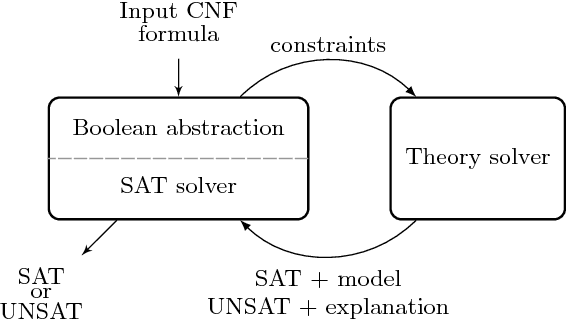
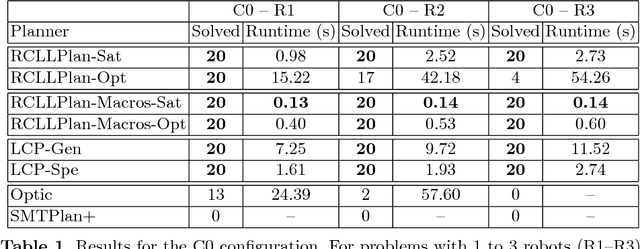
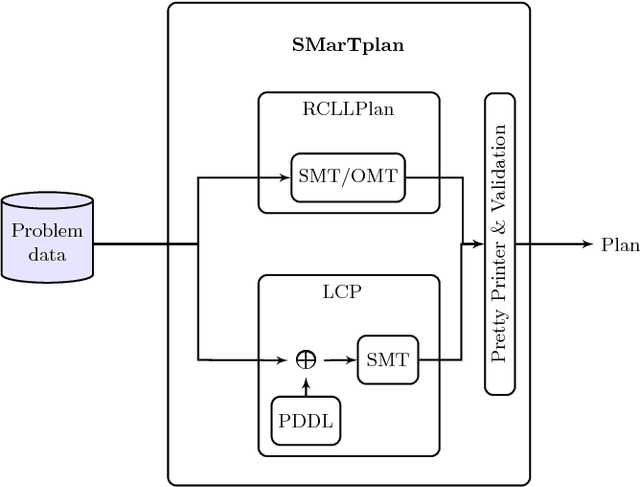
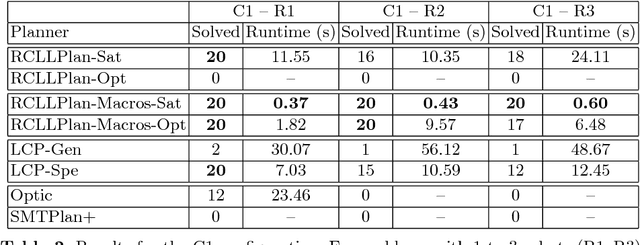
Smart factories are on the verge of becoming the new industrial paradigm, wherein optimization permeates all aspects of production, from concept generation to sales. To fully pursue this paradigm, flexibility in the production means as well as in their timely organization is of paramount importance. AI is planning a major role in this transition, but the scenarios encountered in practice might be challenging for current tools. Task planning is one example where AI enables more efficient and flexible operation through an online automated adaptation and rescheduling of the activities to cope with new operational constraints and demands. In this paper we present SMarTplan, a task planner specifically conceived to deal with real-world scenarios in the emerging smart factory paradigm. Including both special-purpose and general-purpose algorithms, SMarTplan is based on current automated reasoning technology and it is designed to tackle complex application domains. In particular, we show its effectiveness on a logistic scenario, by comparing its specialized version with the general purpose one, and extending the comparison to other state-of-the-art task planners.