 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Task Planning to Secure Human Group Progress
Oct 03, 2023Recent years have seen an increasing number of deployment of fleets of autonomous vehicles. As the problem scales up, in terms of autonomous vehicles number and complexity of their objectives, there is a growing need for decision-support tooling to help the operators in controlling the fleet. In this paper, we present an automated planning system developed to assist the operators in the CoHoMa II challenge, where a fleet of robots, remotely controlled by a handful of operators, must explore and progress through a potential hostile area. In this context, we use planning to provide the operators with suggestions about the actions to consider and their allocation to the robots. This paper especially focus on the modelling of the problem as a hierarchical planning problem for which we use a state-of-the-art automated solver.
* In Proceedings AREA 2023, arXiv:2310.00333
SkiNet, A Petri Net Generation Tool for the Verification of Skillset-based Autonomous Systems
Sep 28, 2022



The need for high-level autonomy and robustness of autonomous systems for missions in dynamic and remote environment has pushed developers to come up with new software architectures. A common architecture style is to summarize the capabilities of the robotic system into elementary actions, called skills, on top of which a skill management layer is implemented to structure, test and control the functional layer. However, current available verification tools only provide either mission-specific verification or verification on a model that does not replicate the actual execution of the system, which makes it difficult to ensure its robustness to unexpected events. To that end, a tool, SkiNet, has been developed to transform the skill-based architecture of a system into a Petri net modeling the state-machine behaviors of the skills and the resources they handle. The Petri net allows the use of model-checking, such as Linear Temporal Logic (LTL) or Computational Tree Logic (CTL), for the user to analyze and verify the model of the system.
* In Proceedings FMAS2022 ASYDE2022, arXiv:2209.13181
Open Loop Execution of Tree-Search Algorithms
May 03, 2018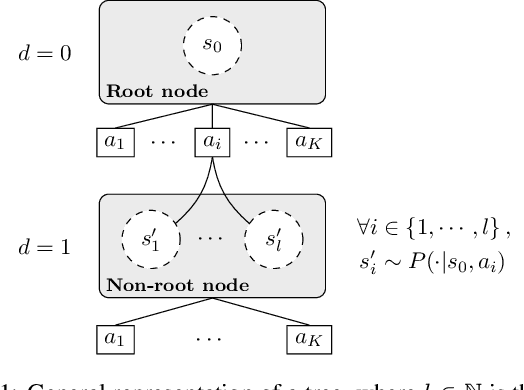
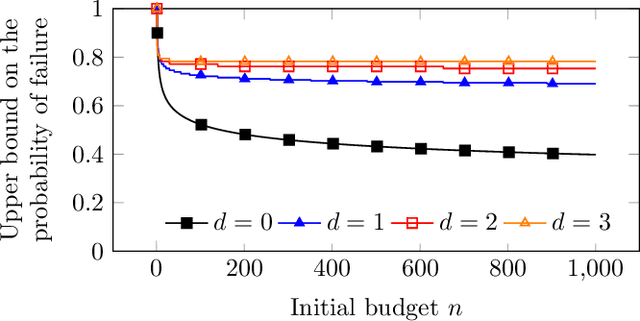
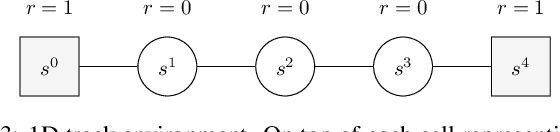
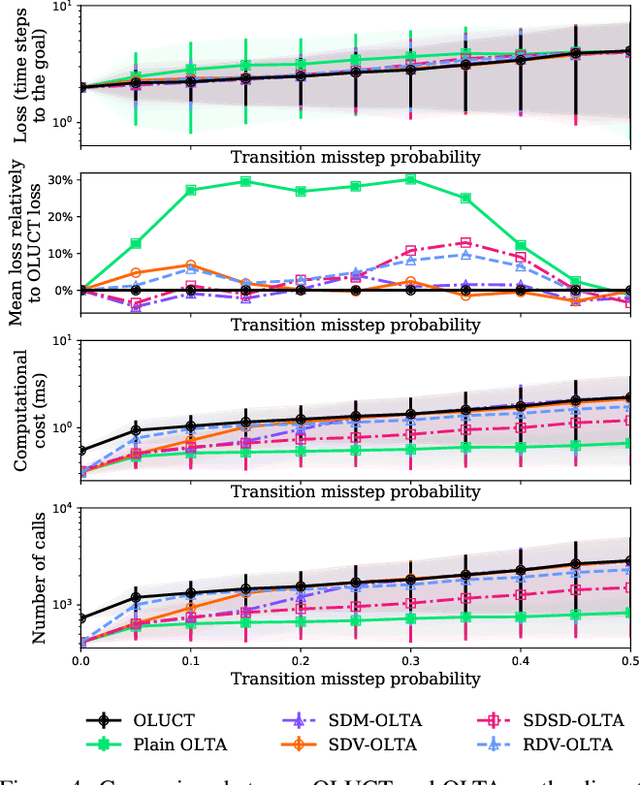
In the context of tree-search stochastic planning algorithms where a generative model is available, we consider on-line planning algorithms building trees in order to recommend an action. We investigate the question of avoiding re-planning in subsequent decision steps by directly using sub-trees as action recommender. Firstly, we propose a method for open loop control via a new algorithm taking the decision of re-planning or not at each time step based on an analysis of the statistics of the sub-tree. Secondly, we show that the probability of selecting a suboptimal action at any depth of the tree can be upper bounded and converges towards zero. Moreover, this upper bound decays in a logarithmic way between subsequent depths. This leads to a distinction between node-wise optimality and state-wise optimality. Finally, we empirically demonstrate that our method achieves a compromise between loss of performance and computational gain.