 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelliMove: Enhancing Robotic Planning with Semantic Mapping
Oct 18, 2024
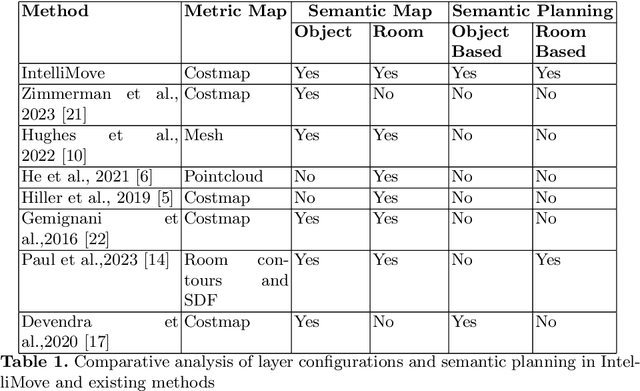
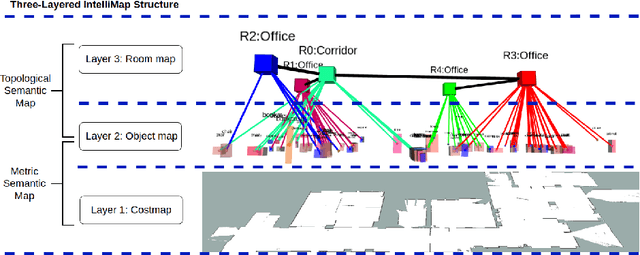
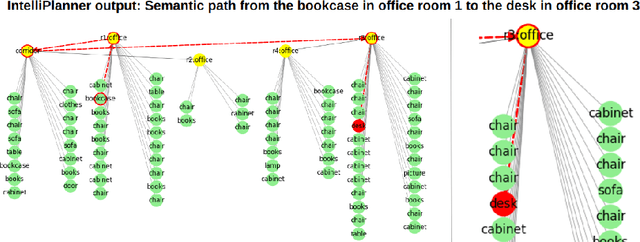
Semantic navigation enables robots to understand their environments beyond basic geometry, allowing them to reason about objects, their functions, and their interrelationships. In semantic robotic navigation, creating accurate and semantically enriched maps is fundamental. Planning based on semantic maps not only enhances the robot's planning efficiency and computational speed but also makes the planning more meaningful, supporting a broader range of semantic tasks. In this paper, we introduce two core modules of IntelliMove: IntelliMap, a generic hierarchical semantic topometric map framework developed through an analysis of current technologies strengths and weaknesses, and Semantic Planning, which utilizes the semantic maps from IntelliMap. We showcase use cases that highlight IntelliMove's adaptability and effectiveness. Through experiments in simulated environments, we further demonstrate IntelliMove's capability in semantic navigation.
SkiNet, A Petri Net Generation Tool for the Verification of Skillset-based Autonomous Systems
Sep 28, 2022



The need for high-level autonomy and robustness of autonomous systems for missions in dynamic and remote environment has pushed developers to come up with new software architectures. A common architecture style is to summarize the capabilities of the robotic system into elementary actions, called skills, on top of which a skill management layer is implemented to structure, test and control the functional layer. However, current available verification tools only provide either mission-specific verification or verification on a model that does not replicate the actual execution of the system, which makes it difficult to ensure its robustness to unexpected events. To that end, a tool, SkiNet, has been developed to transform the skill-based architecture of a system into a Petri net modeling the state-machine behaviors of the skills and the resources they handle. The Petri net allows the use of model-checking, such as Linear Temporal Logic (LTL) or Computational Tree Logic (CTL), for the user to analyze and verify the model of the system.
* In Proceedings FMAS2022 ASYDE2022, arXiv:2209.13181