 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross--layer Formal Verification of Robotic Systems
Nov 21, 2024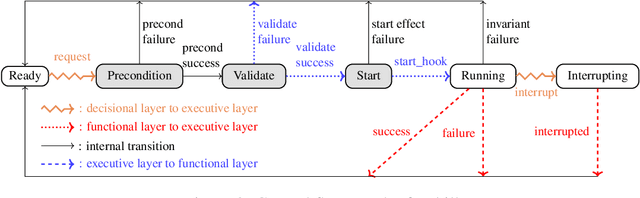
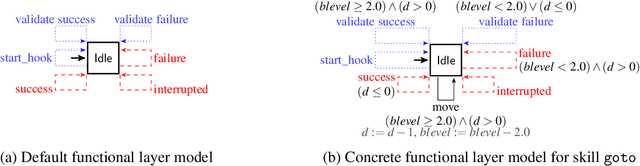
Robotic systems are widely used to interact with humans or to perform critical tasks. As a result, it is imperative to provide guarantees about their behavior. Due to the modularity and complexity of robotic systems, their design and verification are often divided into several layers. However, some system properties can only be investigated by considering multiple layers simultaneously. We propose a cross-layer verification method to verify the expected properties of concrete robotic systems. Our method verifies one layer using abstractions of other layers. We propose two approaches: refining the models of the abstract layers and refining the property under verification. A combination of these two approaches seems to be the most promising to ensure model genericity and to avoid the state-space explosion problem.
* In Proceedings FMAS2024, arXiv:2411.13215
SkiNet, A Petri Net Generation Tool for the Verification of Skillset-based Autonomous Systems
Sep 28, 2022



The need for high-level autonomy and robustness of autonomous systems for missions in dynamic and remote environment has pushed developers to come up with new software architectures. A common architecture style is to summarize the capabilities of the robotic system into elementary actions, called skills, on top of which a skill management layer is implemented to structure, test and control the functional layer. However, current available verification tools only provide either mission-specific verification or verification on a model that does not replicate the actual execution of the system, which makes it difficult to ensure its robustness to unexpected events. To that end, a tool, SkiNet, has been developed to transform the skill-based architecture of a system into a Petri net modeling the state-machine behaviors of the skills and the resources they handle. The Petri net allows the use of model-checking, such as Linear Temporal Logic (LTL) or Computational Tree Logic (CTL), for the user to analyze and verify the model of the system.
* In Proceedings FMAS2022 ASYDE2022, arXiv:2209.13181