 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Variability-Based Framework for Interpretable Naming in Formal and Relational Concept Analysis
Jun 07, 2026Knowledge extraction from symbolic data often produces abstractions that are formally defined but not immediately interpretable by users. Formal Concept Analysis (FCA) and Relational Concept Analysis (RCA) provide representative settings for this issue: they generate explicit conceptual structures, implications, and relational dependencies from object descriptions and relations. Although these structures are explainable by design, their concepts are often identified by technical labels, which limits their use as human-interpretable knowledge units. Assigning meaningful names to such concepts is therefore a key issue for interpretation, navigation, validation, and reuse by domain experts. This paper investigates concept naming in FCA and RCA from a symbolic knowledge representation perspective. We first characterize the linguistic and terminological challenges involved in naming generated symbolic abstractions, including ambiguity, discrimination, concision, and consistency across related concepts. We then propose a configurable framework for LLM-assisted concept naming. The framework relies on a variability model that controls which sources of information are exposed during naming, such as intent, extent, inherited information, neighboring concepts, implications, and relational attributes. It thereby makes explicit the semantic choices involved in moving from formal concept descriptions to human-readable names. The approach is illustrated as a proof of concept on a small relational dataset in the pizzeria domain. This illustration shows how different configurations influence the names suggested by an LLM, and how naming variability can reveal interpretation choices, relational dependencies, and possible modeling issues in the underlying symbolic data.
Variability-Driven User-Story Generation using LLM and Triadic Concept Analysis
Apr 11, 2025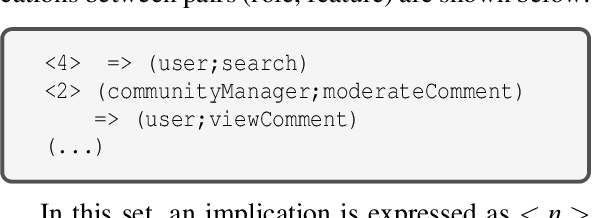
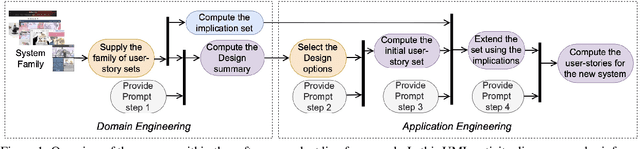


A widely used Agile practice for requirements is to produce a set of user stories (also called ``agile product backlog''), which roughly includes a list of pairs (role, feature), where the role handles the feature for a certain purpose. In the context of Software Product Lines, the requirements for a family of similar systems is thus a family of user-story sets, one per system, leading to a 3-dimensional dataset composed of sets of triples (system, role, feature). In this paper, we combine Triadic Concept Analysis (TCA) and Large Language Model (LLM) prompting to suggest the user-story set required to develop a new system relying on the variability logic of an existing system family. This process consists in 1) computing 3-dimensional variability expressed as a set of TCA implications, 2) providing the designer with intelligible design options, 3) capturing the designer's selection of options, 4) proposing a first user-story set corresponding to this selection, 5) consolidating its validity according to the implications identified in step 1, while completing it if necessary, and 6) leveraging LLM to have a more comprehensive website. This process is evaluated with a dataset comprising the user-story sets of 67 similar-purpose websites.
* 20th International Conference on Evaluation of Novel Approaches to Software Engineering April 4-6, 2025, in Porto, Portugal
Distribution of Responsibility During the Usage of AI-Based Exoskeletons for Upper Limb Rehabilitation
Oct 22, 2024

The ethical issues concerning the AI-based exoskeletons used in healthcare have already been studied literally rather than technically. How the ethical guidelines can be integrated into the development process has not been widely studied. However, this is one of the most important topics which should be studied more in real-life applications. Therefore, in this paper we highlight one ethical concern in the context of an exoskeleton used to train a user to perform a gesture: during the interaction between the exoskeleton, patient and therapist, how is the responsibility for decision making distributed? Based on the outcome of this, we will discuss how to integrate ethical guidelines into the development process of an AI-based exoskeleton. The discussion is based on a case study: AiBle. The different technical factors affecting the rehabilitation results and the human-machine interaction for AI-based exoskeletons are identified and discussed in this paper in order to better apply the ethical guidelines during the development of AI-based exoskeletons.
IntelliMove: Enhancing Robotic Planning with Semantic Mapping
Oct 18, 2024
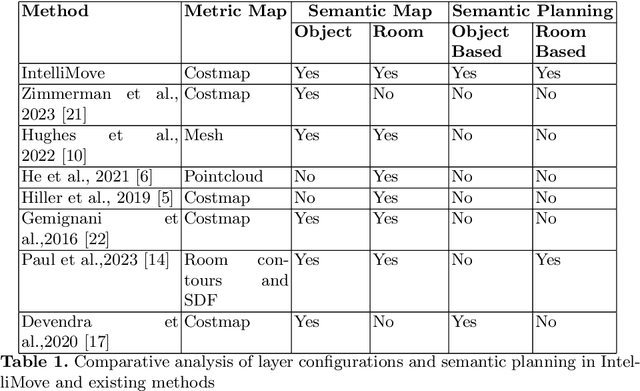
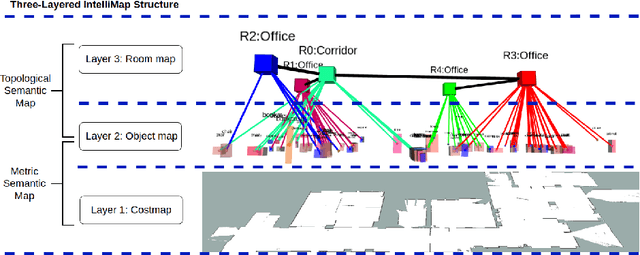
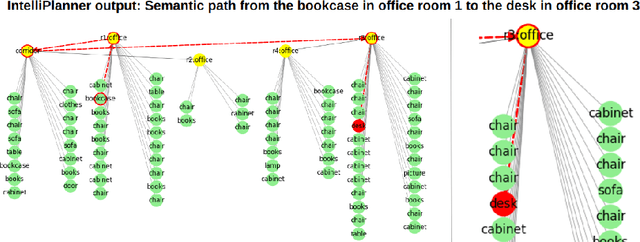
Semantic navigation enables robots to understand their environments beyond basic geometry, allowing them to reason about objects, their functions, and their interrelationships. In semantic robotic navigation, creating accurate and semantically enriched maps is fundamental. Planning based on semantic maps not only enhances the robot's planning efficiency and computational speed but also makes the planning more meaningful, supporting a broader range of semantic tasks. In this paper, we introduce two core modules of IntelliMove: IntelliMap, a generic hierarchical semantic topometric map framework developed through an analysis of current technologies strengths and weaknesses, and Semantic Planning, which utilizes the semantic maps from IntelliMap. We showcase use cases that highlight IntelliMove's adaptability and effectiveness. Through experiments in simulated environments, we further demonstrate IntelliMove's capability in semantic navigation.
On-demand Relational Concept Analysis
Mar 21, 2018
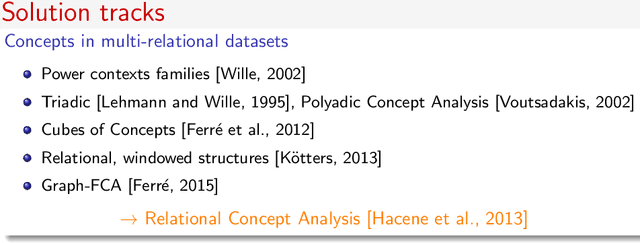
Formal Concept Analysis and its associated conceptual structures have been used to support exploratory search through conceptual navigation. Relational Concept Analysis (RCA) is an extension of Formal Concept Analysis to process relational datasets. RCA and its multiple interconnected structures represent good candidates to support exploratory search in relational datasets, as they are enabling navigation within a structure as well as between the connected structures. However, building the entire structures does not present an efficient solution to explore a small localised area of the dataset, for instance to retrieve the closest alternatives to a given query. In these cases, generating only a concept and its neighbour concepts at each navigation step appears as a less costly alternative. In this paper, we propose an algorithm to compute a concept and its neighbourhood in extended concept lattices. The concepts are generated directly from the relational context family, and possess both formal and relational attributes. The algorithm takes into account two RCA scaling operators. We illustrate it on an example.
Towards An Architecture-Centric Approach to Manage Variability of Cloud Robotics
Jan 13, 2017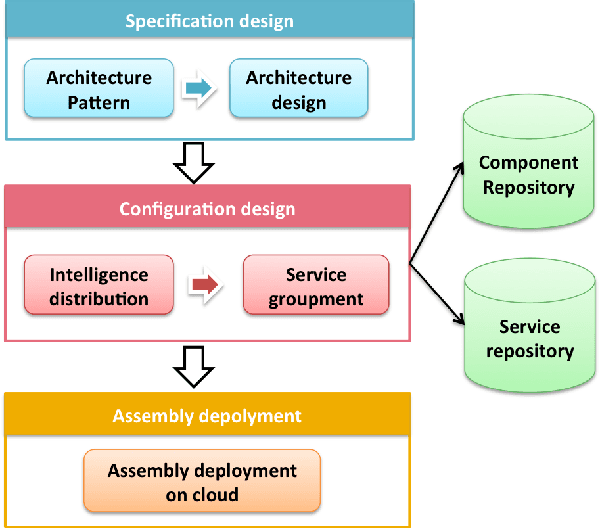
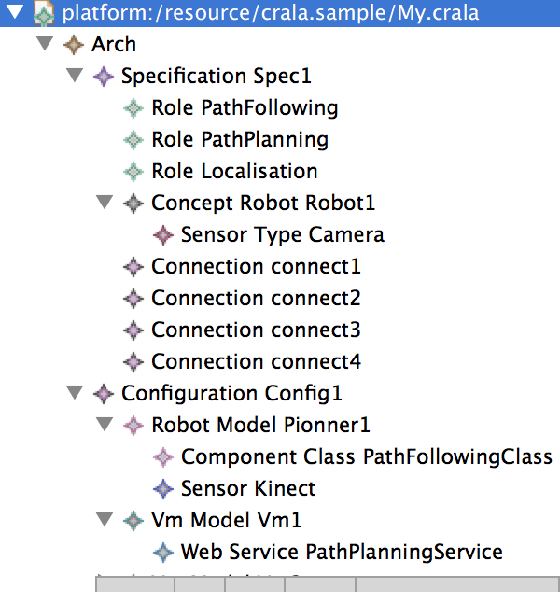


Cloud robotics is a field of robotics that attempts to invoke Cloud technologies such as Cloud computing, Cloud storage, and other Internet technologies centered around the benefits of converged infrastructure and shared services for robotics. In a few short years, Cloud robotics as a newly emerged field has already received much research and industrial attention. The use of the Cloud for robotics and automation brings some potential benefits largely ameliorating the performance of robotic systems. However, there are also some challenges. First of all, from the viewpoint of architecture, how to model and describe the architectures of Cloud robotic systems? How to manage the variability of Cloud robotic systems? How to maximize the reuse of their architectures? In this paper, we present an architecture approach to easily design and understand Cloud robotic systems and manage their variability.