 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistribution of Responsibility During the Usage of AI-Based Exoskeletons for Upper Limb Rehabilitation
Oct 22, 2024

The ethical issues concerning the AI-based exoskeletons used in healthcare have already been studied literally rather than technically. How the ethical guidelines can be integrated into the development process has not been widely studied. However, this is one of the most important topics which should be studied more in real-life applications. Therefore, in this paper we highlight one ethical concern in the context of an exoskeleton used to train a user to perform a gesture: during the interaction between the exoskeleton, patient and therapist, how is the responsibility for decision making distributed? Based on the outcome of this, we will discuss how to integrate ethical guidelines into the development process of an AI-based exoskeleton. The discussion is based on a case study: AiBle. The different technical factors affecting the rehabilitation results and the human-machine interaction for AI-based exoskeletons are identified and discussed in this paper in order to better apply the ethical guidelines during the development of AI-based exoskeletons.
Proceedings of the Fifth International Conference on Cloud and Robotics (ICCR2018)
Mar 12, 2019The 5th edition of the International Conference on Cloud and Robotics (ICCR 2018 - http://cloudrobotics.info) will be held on November 12-14 2018 in Paris and Saint-Quentin, France. The conference is a co-event with GDR ALROB and the industry exposition Robonumerique (http://www.robonumerique.fr). The domain of cloud robotics aims to converge robots with computation, storage and communication resources provided by the cloud. The cloud may complement robotic resources in several ways, including crowd-sourcing knowledge databases, context information, computational offloading or data-intensive information processing for artificial intelligence. Today, the paradigms of cloud/fog/edge computing propose software architecture solutions for robots to share computations or offload them to ambiant and networked resources. Yet, combining distant computations with the real time constraints of robotics is very challenging. As the challenges in this domain are multi-disciplinary and similar in other research areas, Cloud Robotics aims at building bridges among experts from academia and industry working in different fields, such as robotics, cyber-physical systems, automotive, aerospace, machine learning, artificial intelligence, software architecture, big data analytics, Internet-of-Things, networked control and distributed cloud systems.
Proceedings of the Third International Conference on Cloud and Robotics (ICCR2016)
Jun 10, 2017The 3rd International conference on Cloud and Robotics (ICCR2016) was held November 23-23, 2016 in Saint Quentin (France). ICCR is the premier gathering of practitioners and researchers interested in how to bring the power of Cloud computing and Robotics to a new cutting-edge domain: Cloud robotics. The objective of ICCR is a working conference, where together Cloud computing and robotics researchers/practitioners to exchange their ideas. Different with traditional academic conference, ICCR is also a forum for researchers and practitioners in the two disciplines, fostering the collaboration of Cloud computing with robotics, and for practitioners to show their working projects and to discuss and exchange their problems with researchers to find a solution.
Towards An Architecture-Centric Approach to Manage Variability of Cloud Robotics
Jan 13, 2017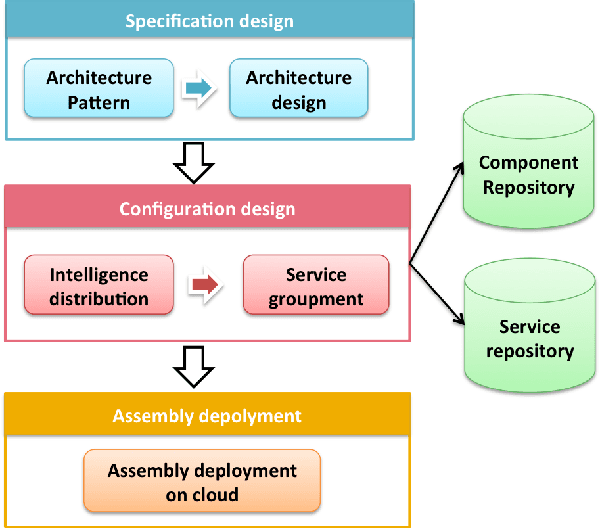
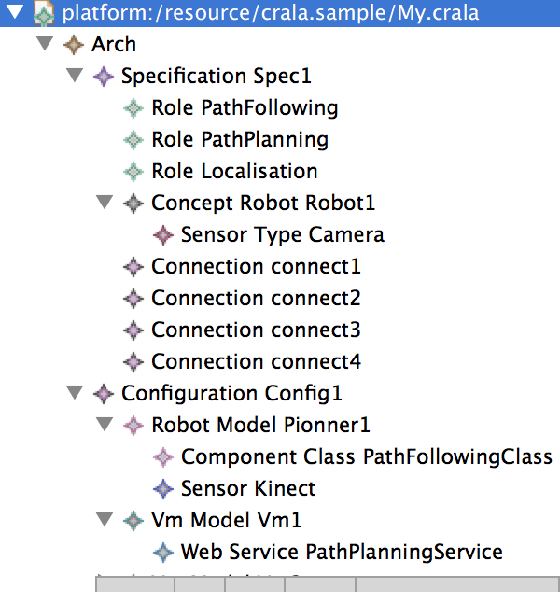


Cloud robotics is a field of robotics that attempts to invoke Cloud technologies such as Cloud computing, Cloud storage, and other Internet technologies centered around the benefits of converged infrastructure and shared services for robotics. In a few short years, Cloud robotics as a newly emerged field has already received much research and industrial attention. The use of the Cloud for robotics and automation brings some potential benefits largely ameliorating the performance of robotic systems. However, there are also some challenges. First of all, from the viewpoint of architecture, how to model and describe the architectures of Cloud robotic systems? How to manage the variability of Cloud robotic systems? How to maximize the reuse of their architectures? In this paper, we present an architecture approach to easily design and understand Cloud robotic systems and manage their variability.