 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExecution Semantics of Behavior Trees in Robotic Applications
Jul 31, 2024



This document aims at describing, in a suitably precise and unambiguous though informal way, the execution semantics of Behavior Trees as used in Robotics applications, with particular attention to the Halt semantics.
A Toolchain to Design, Execute, and Monitor Robots Behaviors
Jun 29, 2021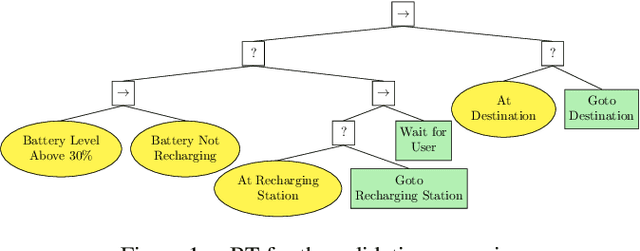
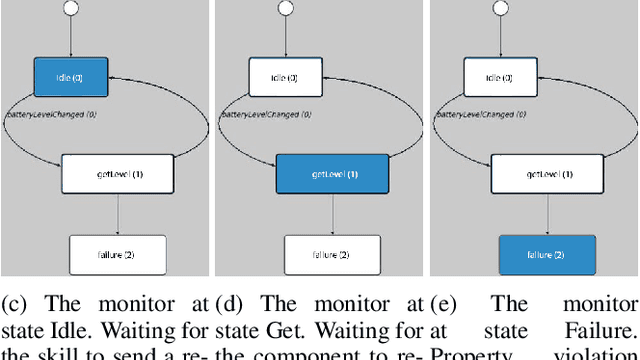
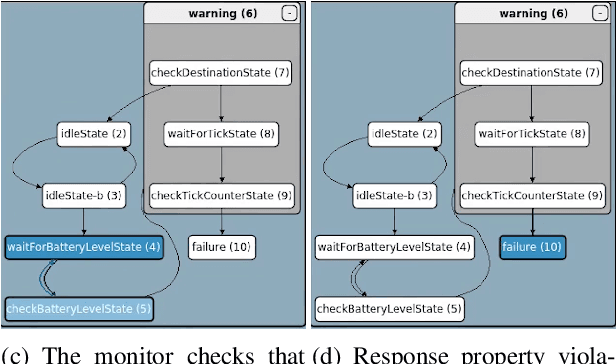
In this paper, we present a toolchain to design, execute, and verify robot behaviors. The toolchain follows the guidelines defined by the EU H2020 project RobMoSys and encodes the robot deliberation as a Behavior Tree (BT), a directed tree where the internal nodes model behavior composition and leaf nodes model action or measurement operations. Such leaf nodes take the form of a statechart (SC), which runs in separate threads, whose states perform basic arithmetic operations and send commands to the robot. The toolchain provides the ability to define a runtime monitor for a given system specification that warns the user whenever a given specification is violated. We validated the toolchain in a simulated experiment that we made reproducible in an OS-virtualization environment.
* arXiv admin note: text overlap with arXiv:2106.12474
Formalizing the Execution Context of Behavior Trees for Runtime Verification of Deliberative Policies
Jun 23, 2021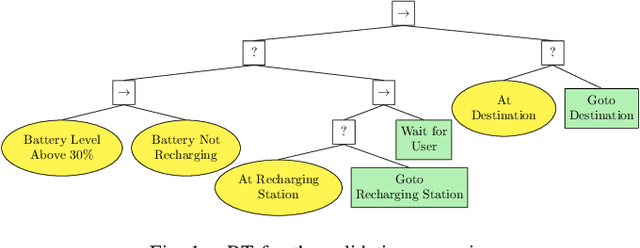
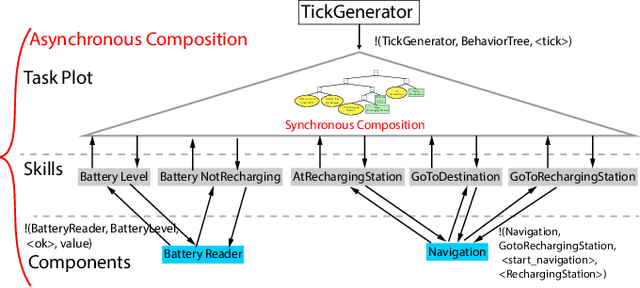
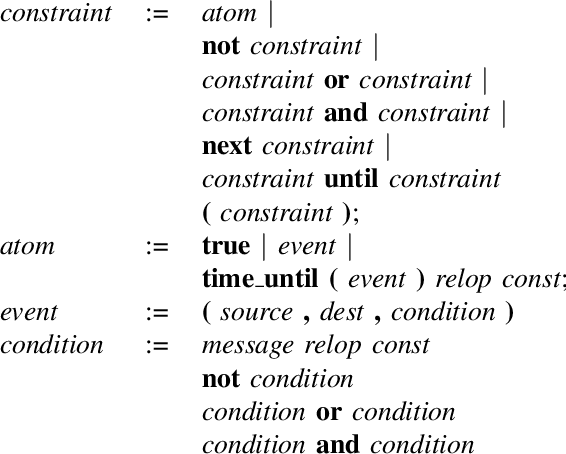
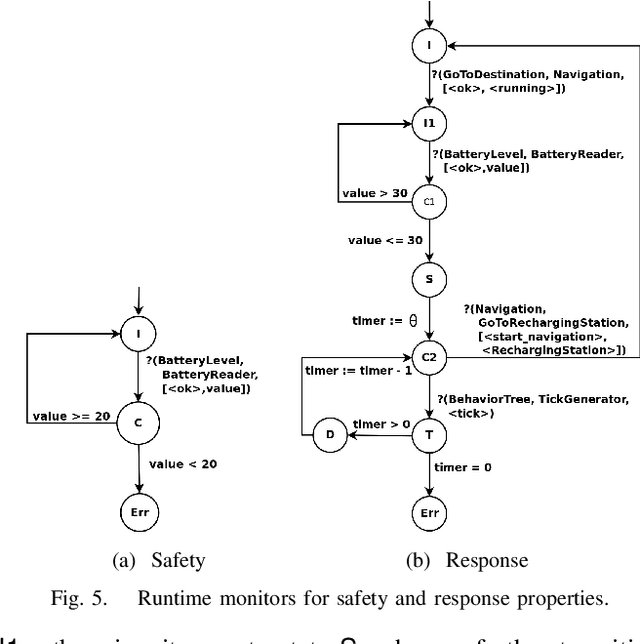
Our research aims to enable automated property verification of deliberative components in robot control architectures. We focus on a formalization of the execution context of Behavior Trees (BTs) to provide a scalable, yet formally grounded, methodology to enable runtime verification and prevent unexpected robot behaviors to hamper deployment. To this end, we consider a message-passing model that accommodates both synchronous and asynchronous composition of parallel components, in which BTs and other components execute and interact according to the communication patterns commonly adopted in robotic software architectures. We introduce a formal property specification language to encode requirements and build runtime monitors. We performed a set of experiments both on simulations and on the real robot, demonstrating the feasibility of our approach in a realistic application, and its integration in a typical robot software architecture. We also provide an OS-level virtualization environment to reproduce the experiments in the simulated scenario.
NeVer 2.0: Learning, Verification and Repair of Deep Neural Networks
Nov 18, 2020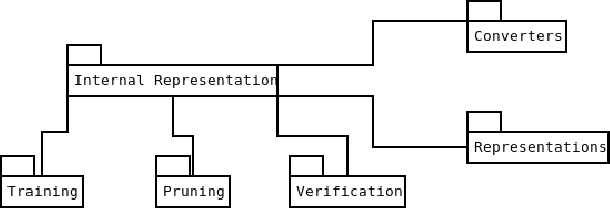
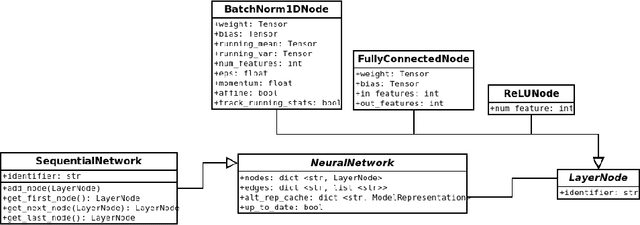

In this work, we present an early prototype of NeVer 2.0, a new system for automated synthesis and analysis of deep neural networks.NeVer 2.0borrows its design philosophy from NeVer, the first package that integrated learning, automated verification and repair of (shallow) neural networks in a single tool. The goal of NeVer 2.0 is to provide a similar integration for deep networks by leveraging a selection of state-of-the-art learning frameworks and integrating them with verification algorithms to ease the scalability challenge and make repair of faulty networks possible.
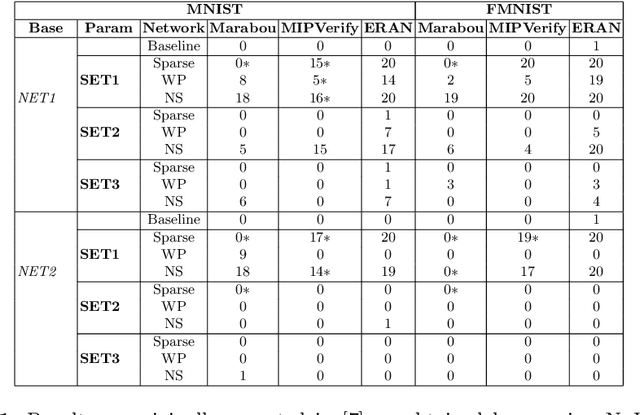
Verification of Neural Networks: Enhancing Scalability through Pruning
Mar 17, 2020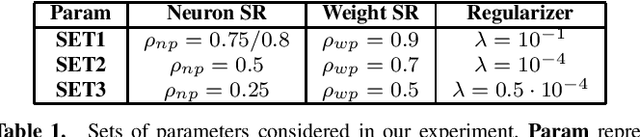
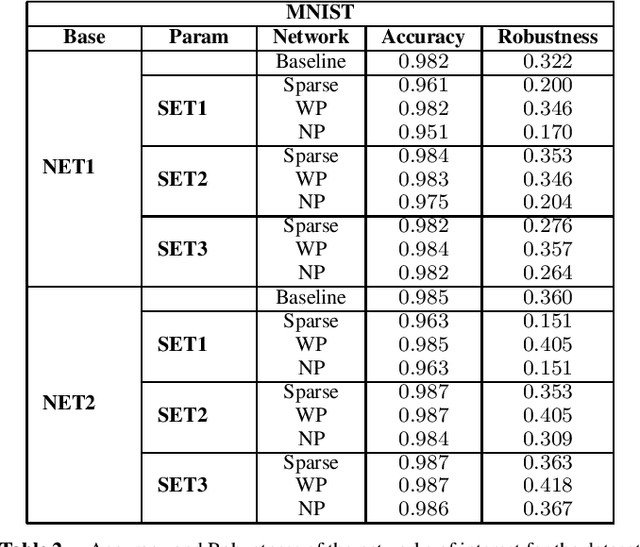
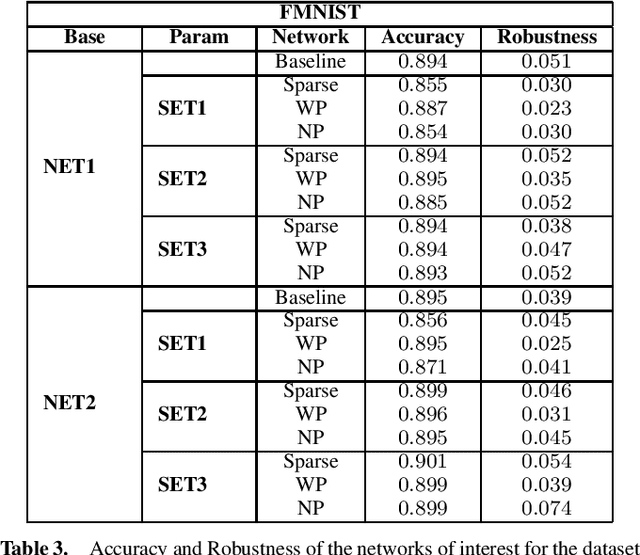
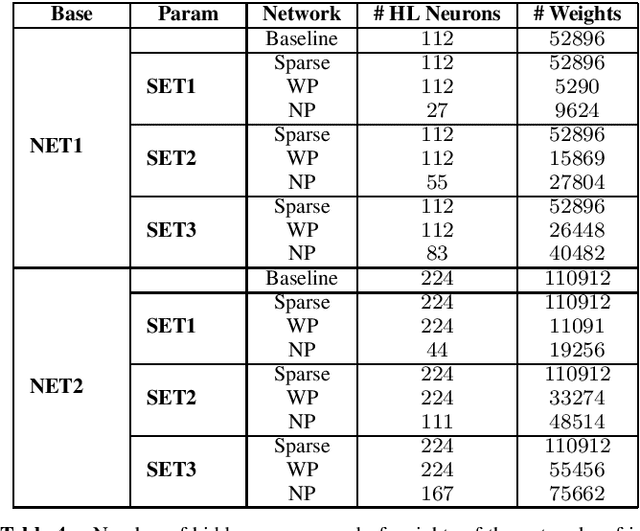
Verification of deep neural networks has witnessed a recent surge of interest, fueled by success stories in diverse domains and by abreast concerns about safety and security in envisaged applications. Complexity and sheer size of such networks are challenging for automated formal verification techniques which, on the other hand, could ease the adoption of deep networks in safety- and security-critical contexts. In this paper we focus on enabling state-of-the-art verification tools to deal with neural networks of some practical interest. We propose a new training pipeline based on network pruning with the goal of striking a balance between maintaining accuracy and robustness while making the resulting networks amenable to formal analysis. The results of our experiments with a portfolio of pruning algorithms and verification tools show that our approach is successful for the kind of networks we consider and for some combinations of pruning and verification techniques, thus bringing deep neural networks closer to the reach of formally-grounded methods.
SMarTplan: a Task Planner for Smart Factories
Jun 19, 2018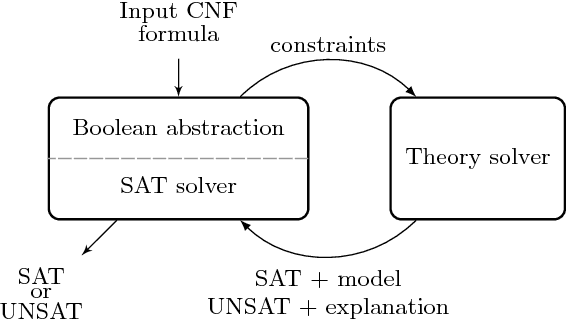
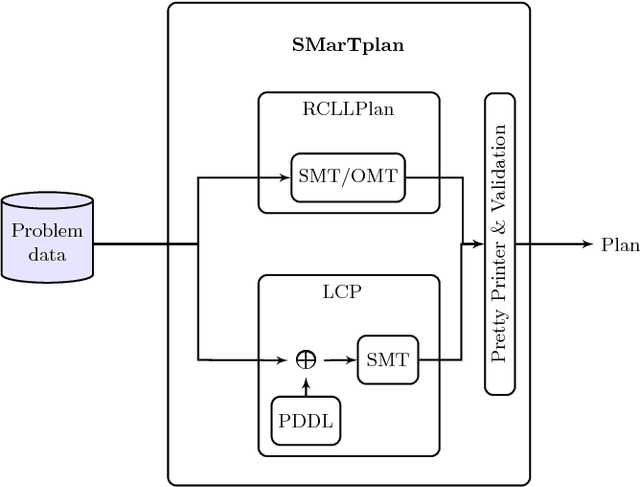
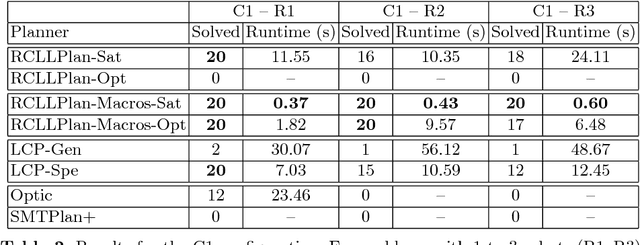
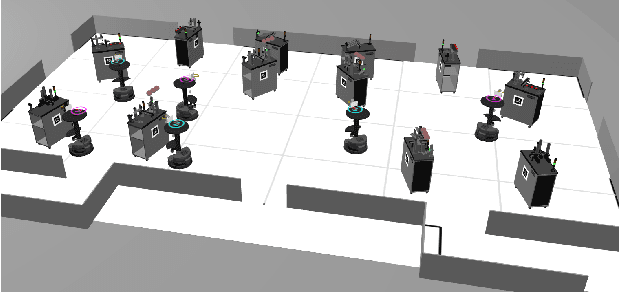
Smart factories are on the verge of becoming the new industrial paradigm, wherein optimization permeates all aspects of production, from concept generation to sales. To fully pursue this paradigm, flexibility in the production means as well as in their timely organization is of paramount importance. AI is planning a major role in this transition, but the scenarios encountered in practice might be challenging for current tools. Task planning is one example where AI enables more efficient and flexible operation through an online automated adaptation and rescheduling of the activities to cope with new operational constraints and demands. In this paper we present SMarTplan, a task planner specifically conceived to deal with real-world scenarios in the emerging smart factory paradigm. Including both special-purpose and general-purpose algorithms, SMarTplan is based on current automated reasoning technology and it is designed to tackle complex application domains. In particular, we show its effectiveness on a logistic scenario, by comparing its specialized version with the general purpose one, and extending the comparison to other state-of-the-art task planners.
Automated Verification of Neural Networks: Advances, Challenges and Perspectives
May 25, 2018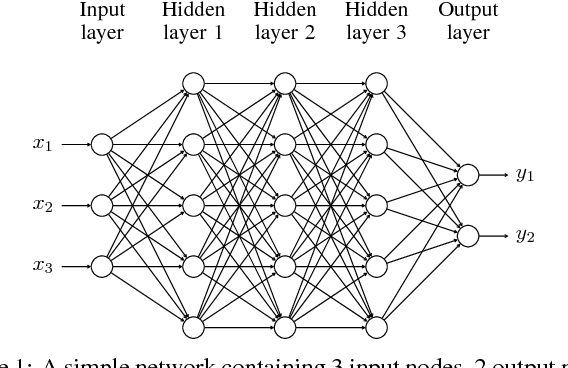
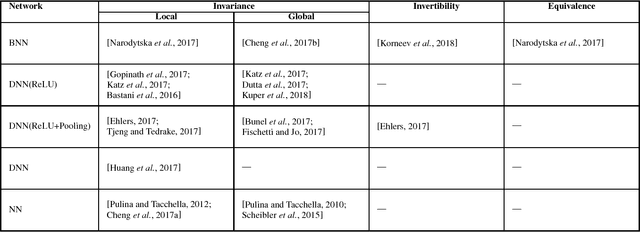
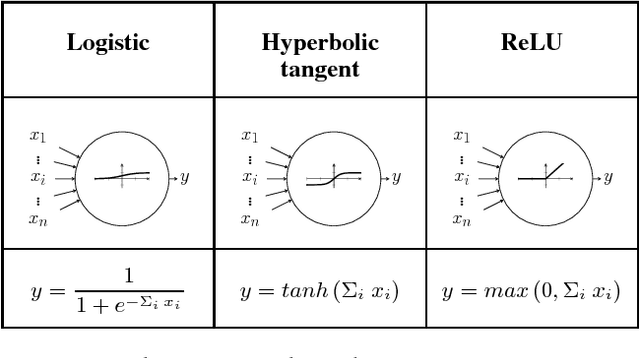

Neural networks are one of the most investigated and widely used techniques in Machine Learning. In spite of their success, they still find limited application in safety- and security-related contexts, wherein assurance about networks' performances must be provided. In the recent past, automated reasoning techniques have been proposed by several researchers to close the gap between neural networks and applications requiring formal guarantees about their behavior. In this work, we propose a primer of such techniques and a comprehensive categorization of existing approaches for the automated verification of neural networks. A discussion about current limitations and directions for future investigation is provided to foster research on this topic at the crossroads of Machine Learning and Automated Reasoning.
Constrained Image Generation Using Binarized Neural Networks with Decision Procedures
Feb 24, 2018



We consider the problem of binary image generation with given properties. This problem arises in a number of practical applications, including generation of artificial porous medium for an electrode of lithium-ion batteries, for composed materials, etc. A generated image represents a porous medium and, as such, it is subject to two sets of constraints: topological constraints on the structure and process constraints on the physical process over this structure. To perform image generation we need to define a mapping from a porous medium to its physical process parameters. For a given geometry of a porous medium, this mapping can be done by solving a partial differential equation (PDE). However, embedding a PDE solver into the search procedure is computationally expensive. We use a binarized neural network to approximate a PDE solver. This allows us to encode the entire problem as a logical formula. Our main contribution is that, for the first time, we show that this problem can be tackled using decision procedures. Our experiments show that our model is able to produce random constrained images that satisfy both topological and process constraints.
On the Synthesis of Guaranteed-Quality Plans for Robot Fleets in Logistics Scenarios via Optimization Modulo Theories
Nov 12, 2017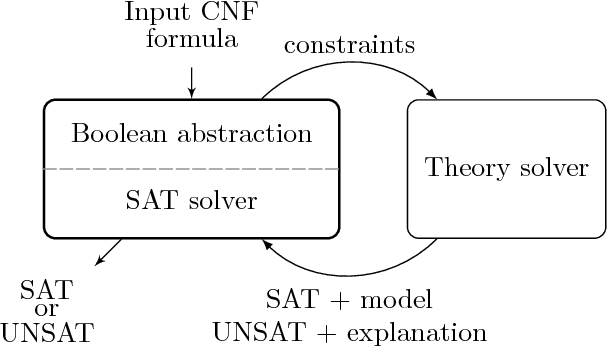


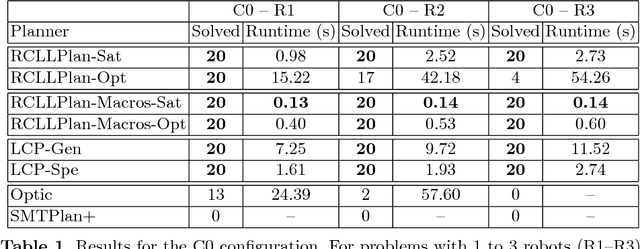
In manufacturing, the increasing involvement of autonomous robots in production processes poses new challenges on the production management. In this paper we report on the usage of Optimization Modulo Theories (OMT) to solve certain multi-robot scheduling problems in this area. Whereas currently existing methods are heuristic, our approach guarantees optimality for the computed solution. We do not only present our final method but also its chronological development, and draw some general observations for the development of OMT-based approaches.
Ontologies in System Engineering: a Field Report
Feb 23, 2017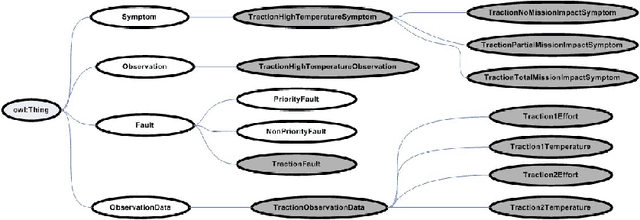
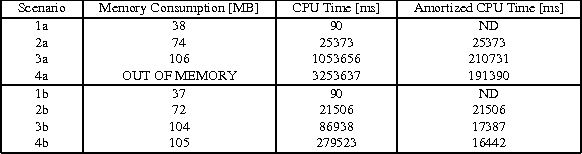
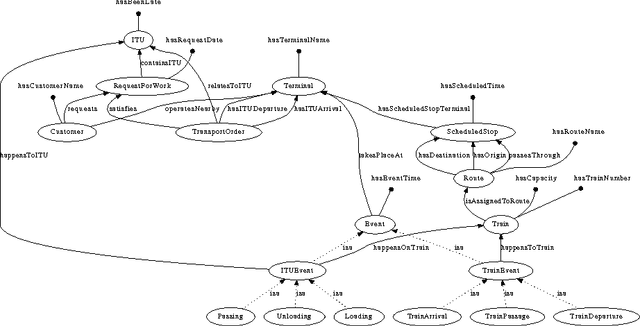
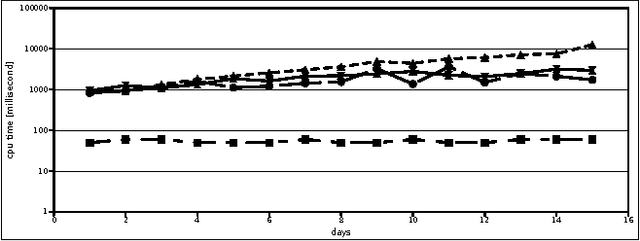
In recent years ontologies enjoyed a growing popularity outside specialized AI communities. System engineering is no exception to this trend, with ontologies being proposed as a basis for several tasks in complex industrial implements, including system design, monitoring and diagnosis. In this paper, we consider four different contributions to system engineering wherein ontologies are instrumental to provide enhancements over traditional ad-hoc techniques. For each application, we briefly report the methodologies, the tools and the results obtained with the goal to provide an assessment of merits and limits of ontologies in such domains.