 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormalizing the Execution Context of Behavior Trees for Runtime Verification of Deliberative Policies
Paper and Code
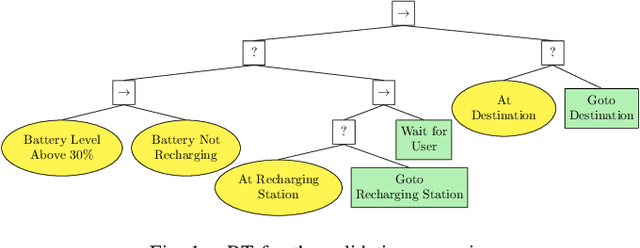
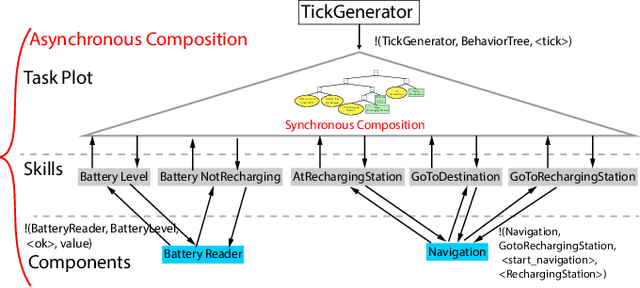
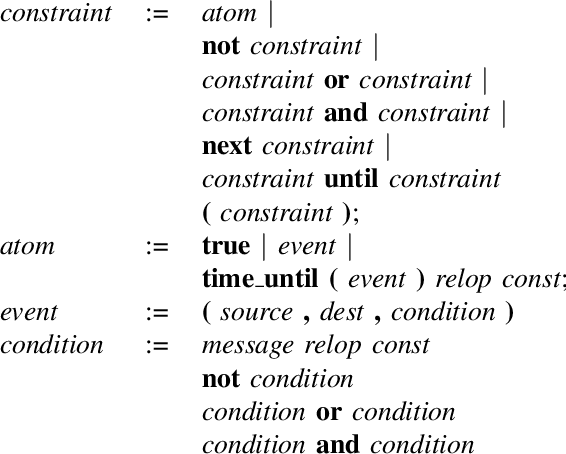
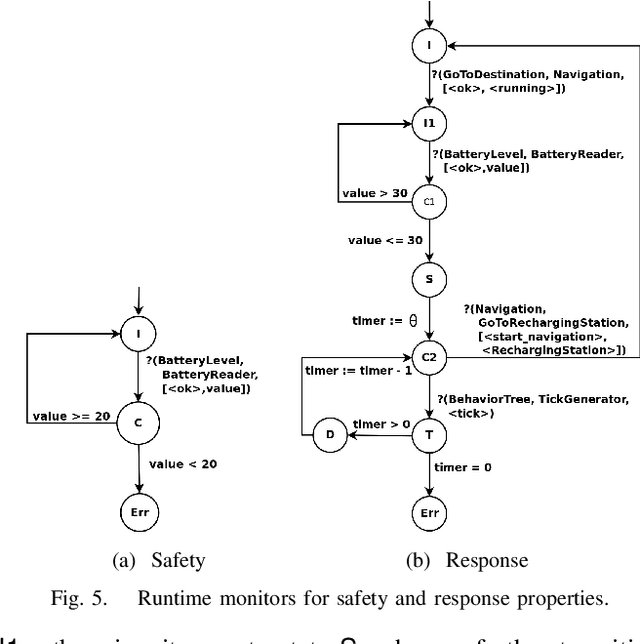
Our research aims to enable automated property verification of deliberative components in robot control architectures. We focus on a formalization of the execution context of Behavior Trees (BTs) to provide a scalable, yet formally grounded, methodology to enable runtime verification and prevent unexpected robot behaviors to hamper deployment. To this end, we consider a message-passing model that accommodates both synchronous and asynchronous composition of parallel components, in which BTs and other components execute and interact according to the communication patterns commonly adopted in robotic software architectures. We introduce a formal property specification language to encode requirements and build runtime monitors. We performed a set of experiments both on simulations and on the real robot, demonstrating the feasibility of our approach in a realistic application, and its integration in a typical robot software architecture. We also provide an OS-level virtualization environment to reproduce the experiments in the simulated scenario.