Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Synthesis of Guaranteed-Quality Plans for Robot Fleets in Logistics Scenarios via Optimization Modulo Theories
Paper and Code
Nov 12, 2017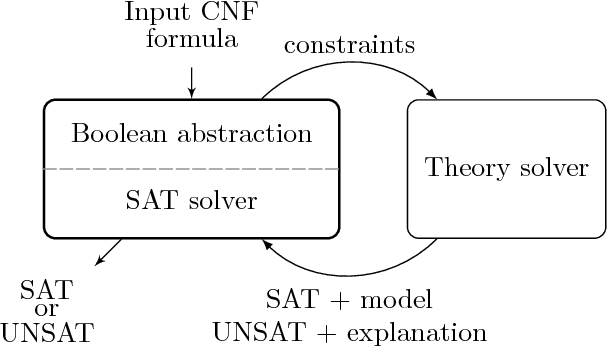


In manufacturing, the increasing involvement of autonomous robots in production processes poses new challenges on the production management. In this paper we report on the usage of Optimization Modulo Theories (OMT) to solve certain multi-robot scheduling problems in this area. Whereas currently existing methods are heuristic, our approach guarantees optimality for the computed solution. We do not only present our final method but also its chronological development, and draw some general observations for the development of OMT-based approaches.
View paper on