 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hierarchical Framework for Collaborative Artificial Intelligence
Dec 14, 2022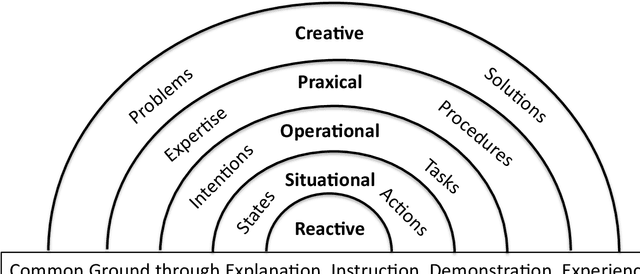
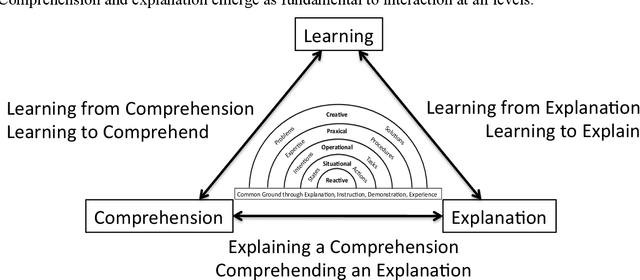
We propose a hierarchical framework for collaborative intelligent systems. This framework organizes research challenges based on the nature of the collaborative activity and the information that must be shared, with each level building on capabilities provided by lower levels. We review research paradigms at each level, with a description of classical engineering-based approaches and modern alternatives based on machine learning, illustrated with a running example using a hypothetical personal service robot. We discuss cross-cutting issues that occur at all levels, focusing on the problem of communicating and sharing comprehension, the role of explanation and the social nature of collaboration. We conclude with a summary of research challenges and a discussion of the potential for economic and societal impact provided by technologies that enhance human abilities and empower people and society through collaboration with Intelligent Systems.
Baby Robot: Improving the Motor Skills of Toddlers
Sep 19, 2021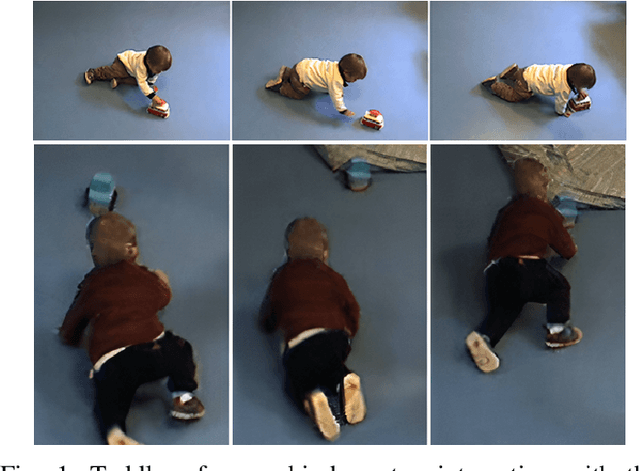
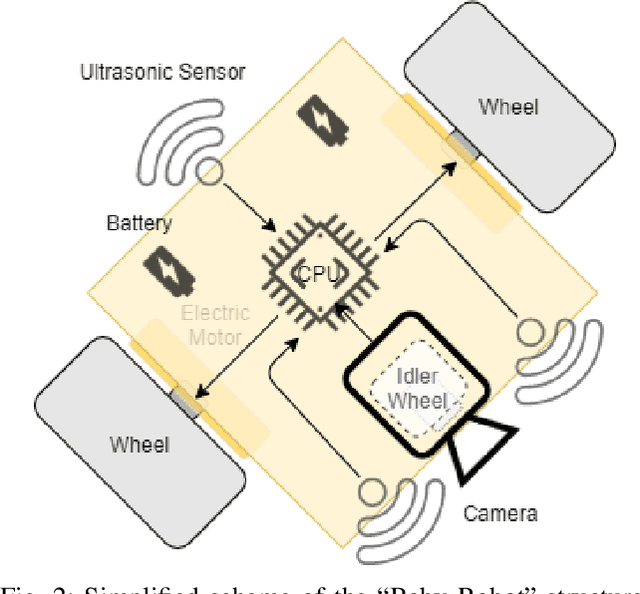
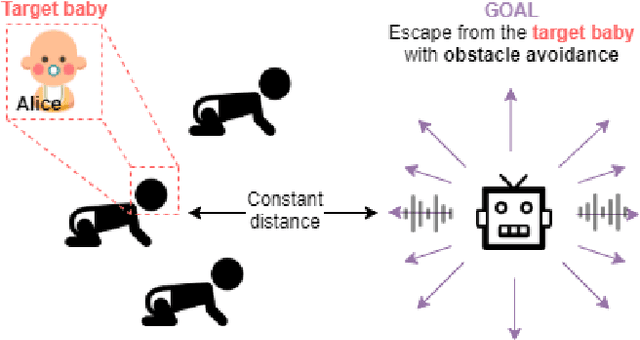

This article introduces "Baby Robot", a robot aiming to improve motor skills of babies and toddlers. Authors developed a car-like toy that moves autonomously using reinforcement learning and computer vision techniques. The robot behaviour is to escape from a target baby that has been previously recognized, or at least detected, while avoiding obstacles, so that the security of the baby is not compromised. A myriad of commercial toys with a similar mobility improvement purpose are into the market; however, there is no one that bets for an intelligent autonomous movement, as they perform simple yet repetitive trajectories in the best of the cases. Two crawling toys -- one in representation of "Baby Robot" -- were tested in a real environment with respect to regular toys in order to check how they improved the toddlers mobility. These real-life experiments were conducted with our proposed robot in a kindergarten, where a group of children interacted with the toys. Significant improvement in the motion skills of participants were detected.