 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBaby Robot: Improving the Motor Skills of Toddlers
Sep 19, 2021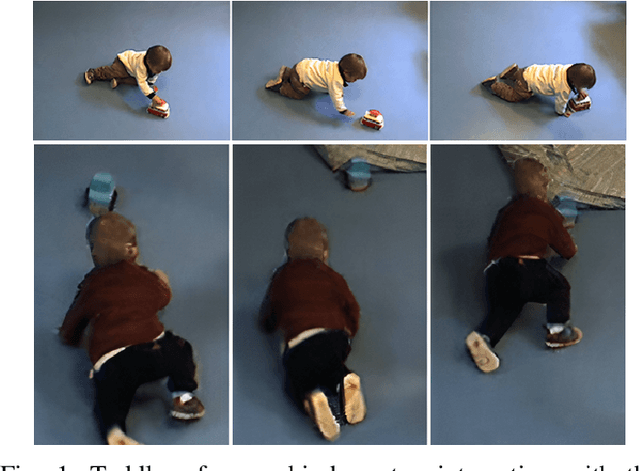
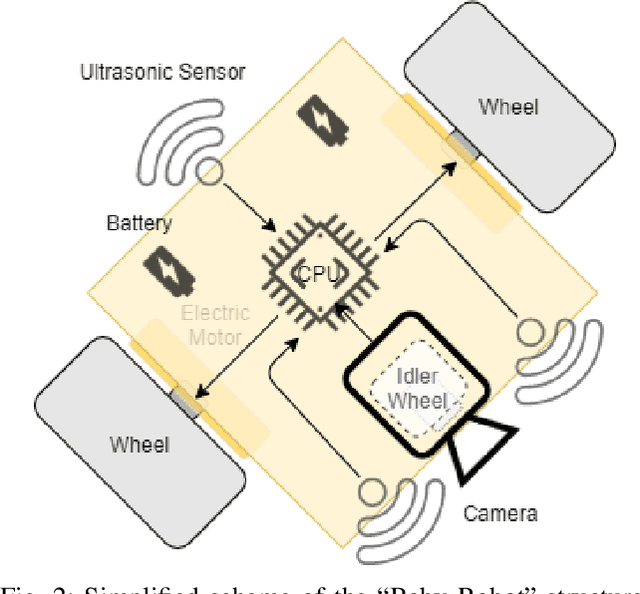
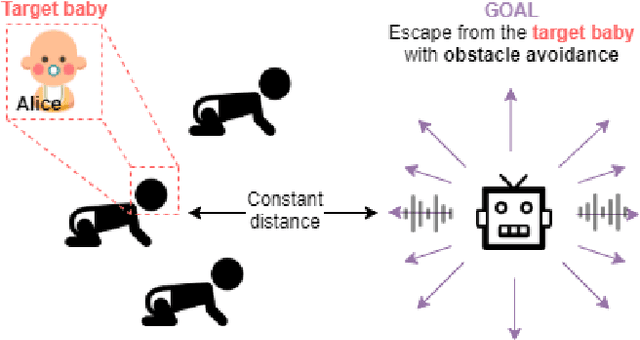

This article introduces "Baby Robot", a robot aiming to improve motor skills of babies and toddlers. Authors developed a car-like toy that moves autonomously using reinforcement learning and computer vision techniques. The robot behaviour is to escape from a target baby that has been previously recognized, or at least detected, while avoiding obstacles, so that the security of the baby is not compromised. A myriad of commercial toys with a similar mobility improvement purpose are into the market; however, there is no one that bets for an intelligent autonomous movement, as they perform simple yet repetitive trajectories in the best of the cases. Two crawling toys -- one in representation of "Baby Robot" -- were tested in a real environment with respect to regular toys in order to check how they improved the toddlers mobility. These real-life experiments were conducted with our proposed robot in a kindergarten, where a group of children interacted with the toys. Significant improvement in the motion skills of participants were detected.