 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNatural Language Guided Ligand-Binding Protein Design
Jun 11, 2025Can AI protein models follow human language instructions and design proteins with desired functions (e.g. binding to a ligand)? Designing proteins that bind to a given ligand is crucial in a wide range of applications in biology and chemistry. Most prior AI models are trained on protein-ligand complex data, which is scarce due to the high cost and time requirements of laboratory experiments. In contrast, there is a substantial body of human-curated text descriptions about protein-ligand interactions and ligand formula. In this paper, we propose InstructPro, a family of protein generative models that follow natural language instructions to design ligand-binding proteins. Given a textual description of the desired function and a ligand formula in SMILES, InstructPro generates protein sequences that are functionally consistent with the specified instructions. We develop the model architecture, training strategy, and a large-scale dataset, InstructProBench, to support both training and evaluation. InstructProBench consists of 9,592,829 triples of (function description, ligand formula, protein sequence). We train two model variants: InstructPro-1B (with 1 billion parameters) and InstructPro-3B~(with 3 billion parameters). Both variants consistently outperform strong baselines, including ProGen2, ESM3, and Pinal. Notably, InstructPro-1B achieves the highest docking success rate (81.52% at moderate confidence) and the lowest average root mean square deviation (RMSD) compared to ground truth structures (4.026{\AA}). InstructPro-3B further descreases the average RMSD to 2.527{\AA}, demonstrating InstructPro's ability to generate ligand-binding proteins that align with the functional specifications.
Aya Dataset: An Open-Access Collection for Multilingual Instruction Tuning
Feb 09, 2024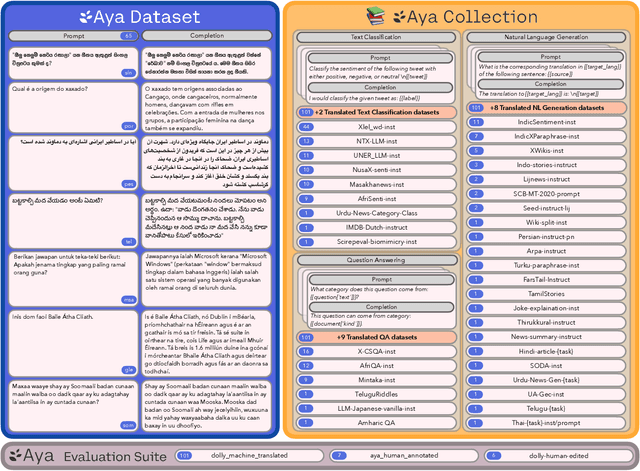
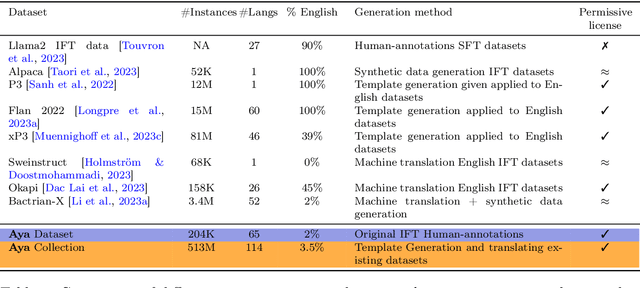
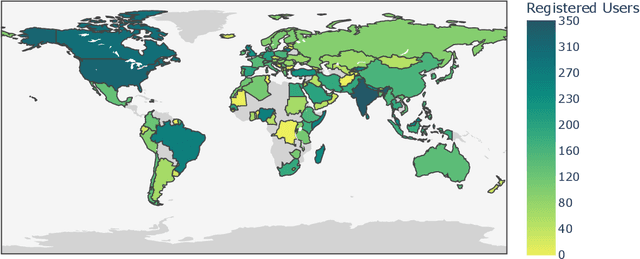
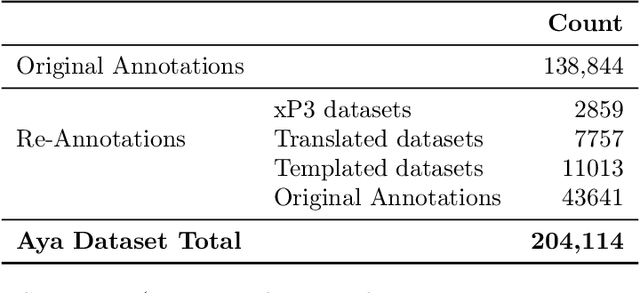
Datasets are foundational to many breakthroughs in modern artificial intelligence. Many recent achievements in the space of natural language processing (NLP) can be attributed to the finetuning of pre-trained models on a diverse set of tasks that enables a large language model (LLM) to respond to instructions. Instruction fine-tuning (IFT) requires specifically constructed and annotated datasets. However, existing datasets are almost all in the English language. In this work, our primary goal is to bridge the language gap by building a human-curated instruction-following dataset spanning 65 languages. We worked with fluent speakers of languages from around the world to collect natural instances of instructions and completions. Furthermore, we create the most extensive multilingual collection to date, comprising 513 million instances through templating and translating existing datasets across 114 languages. In total, we contribute four key resources: we develop and open-source the Aya Annotation Platform, the Aya Dataset, the Aya Collection, and the Aya Evaluation Suite. The Aya initiative also serves as a valuable case study in participatory research, involving collaborators from 119 countries. We see this as a valuable framework for future research collaborations that aim to bridge gaps in resources.
QuATON: Quantization Aware Training of Optical Neurons
Oct 04, 2023



Optical neural architectures (ONAs) use coding elements with optimized physical parameters to perform intelligent measurements. However, fabricating ONAs while maintaining design performances is challenging. Limitations in fabrication techniques often limit the realizable precision of the trained parameters. Physical constraints may also limit the range of values the physical parameters can hold. Thus, ONAs should be trained within the implementable constraints. However, such physics-based constraints reduce the training objective to a constrained optimization problem, making it harder to optimize with existing gradient-based methods. To alleviate these critical issues that degrade performance from simulation to realization we propose a physics-informed quantization-aware training framework. Our approach accounts for the physical constraints during the training process, leading to robust designs. We evaluate our approach on an ONA proposed in the literature, named a diffractive deep neural network (D2NN), for all-optical phase imaging and for classification of phase objects. With extensive experiments on different quantization levels and datasets, we show that our approach leads to ONA designs that are robust to quantization noise.
Deep Optical Coding Design in Computational Imaging
Jun 27, 2022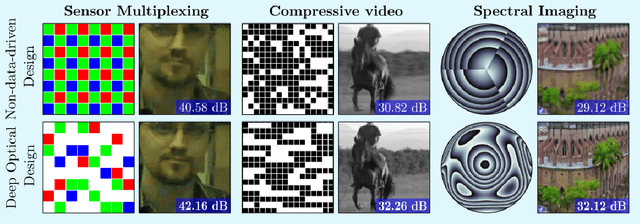
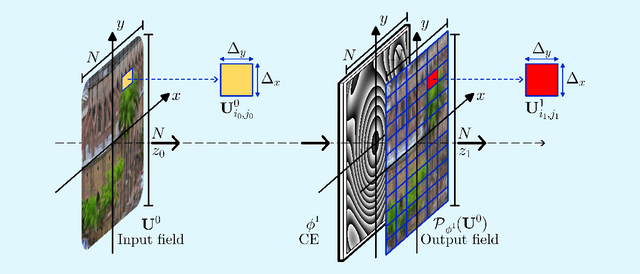
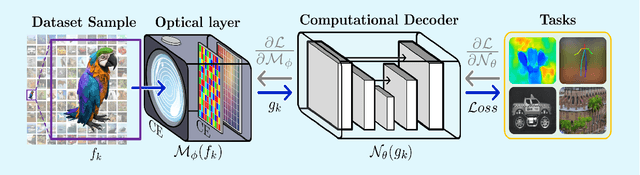
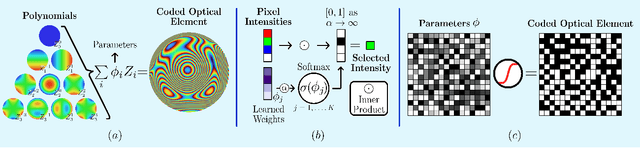
Computational optical imaging (COI) systems leverage optical coding elements (CE) in their setups to encode a high-dimensional scene in a single or multiple snapshots and decode it by using computational algorithms. The performance of COI systems highly depends on the design of its main components: the CE pattern and the computational method used to perform a given task. Conventional approaches rely on random patterns or analytical designs to set the distribution of the CE. However, the available data and algorithm capabilities of deep neural networks (DNNs) have opened a new horizon in CE data-driven designs that jointly consider the optical encoder and computational decoder. Specifically, by modeling the COI measurements through a fully differentiable image formation model that considers the physics-based propagation of light and its interaction with the CEs, the parameters that define the CE and the computational decoder can be optimized in an end-to-end (E2E) manner. Moreover, by optimizing just CEs in the same framework, inference tasks can be performed from pure optics. This work surveys the recent advances on CE data-driven design and provides guidelines on how to parametrize different optical elements to include them in the E2E framework. Since the E2E framework can handle different inference applications by changing the loss function and the DNN, we present low-level tasks such as spectral imaging reconstruction or high-level tasks such as pose estimation with privacy preserving enhanced by using optimal task-based optical architectures. Finally, we illustrate classification and 3D object recognition applications performed at the speed of the light using all-optics DNN.
From Hours to Seconds: Towards 100x Faster Quantitative Phase Imaging via Differentiable Microscopy
May 23, 2022



With applications ranging from metabolomics to histopathology, quantitative phase microscopy (QPM) is a powerful label-free imaging modality. Despite significant advances in fast multiplexed imaging sensors and deep-learning-based inverse solvers, the throughput of QPM is currently limited by the speed of electronic hardware. Complementarily, to improve throughput further, here we propose to acquire images in a compressed form such that more information can be transferred beyond the existing electronic hardware bottleneck. To this end, we present a learnable optical compression-decompression framework that learns content-specific features. The proposed differentiable optical-electronic quantitative phase microscopy ($\partial \mu$) first uses learnable optical feature extractors as image compressors. The intensity representation produced by these networks is then captured by the imaging sensor. Finally, a reconstruction network running on electronic hardware decompresses the QPM images. The proposed system achieves compression of $\times$ 64 while maintaining the SSIM of $\sim 0.90$ and PSNR of $\sim 30$ dB. The promising results demonstrated by our experiments open up a new pathway for achieving end-to-end optimized (i.e., optics and electronic) compact QPM systems that provide unprecedented throughput improvements.
Differentiable Microscopy Designs an All Optical Quantitative Phase Microscope
Apr 13, 2022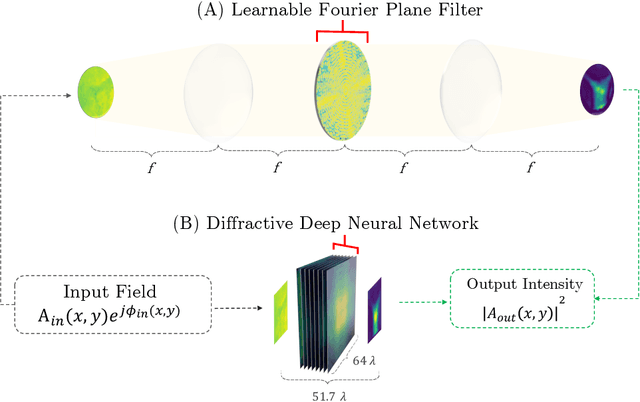

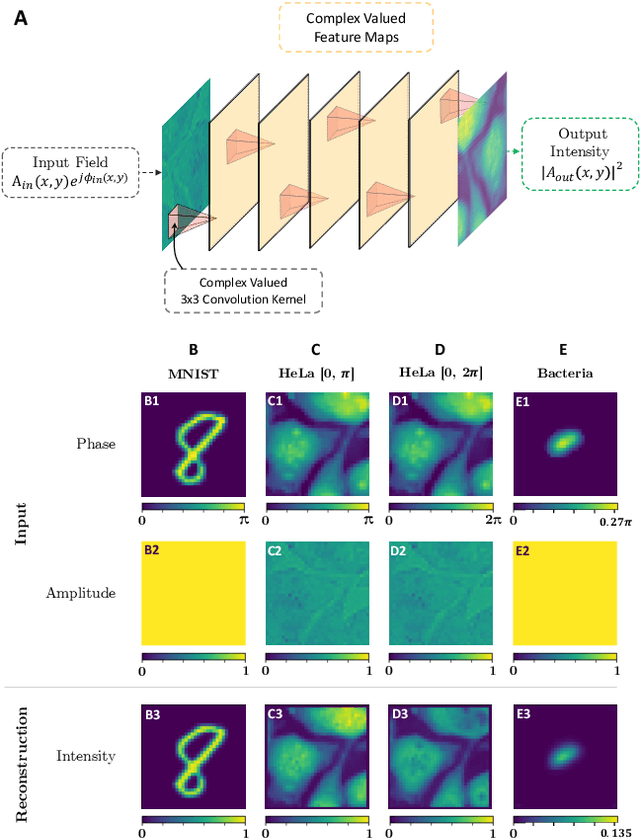
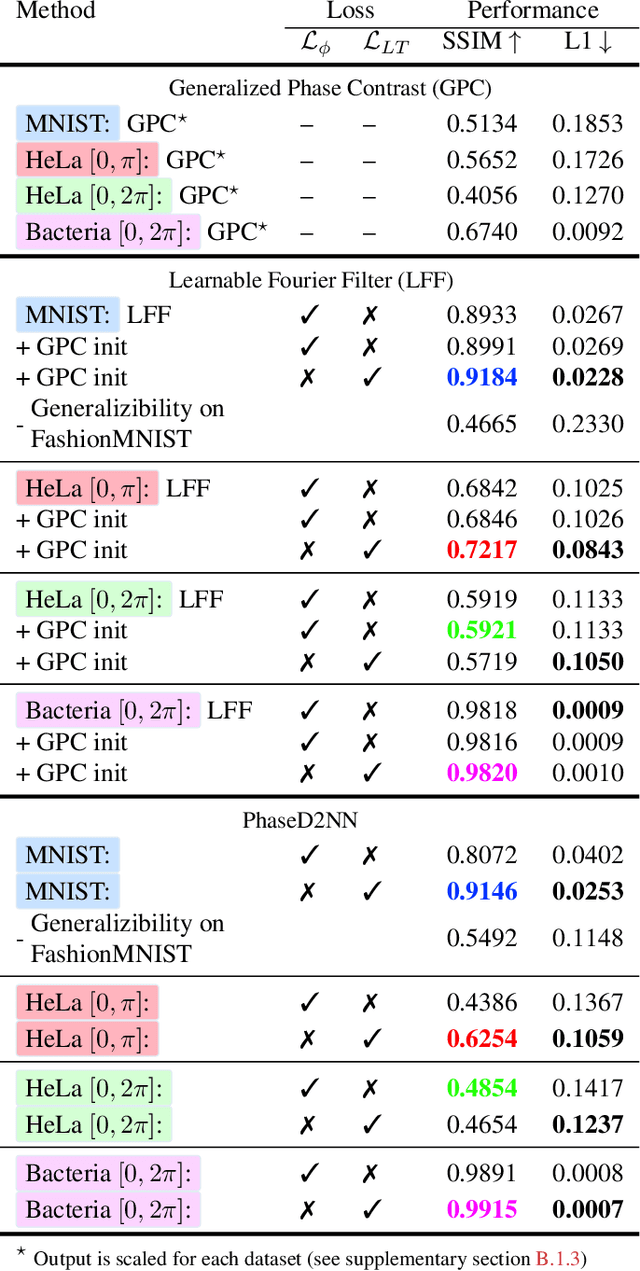
Ever since the first microscope by Zacharias Janssen in the late 16th century, scientists have been inventing new types of microscopes for various tasks. Inventing a novel architecture demands years, if not decades, worth of scientific experience and creativity. In this work, we introduce Differentiable Microscopy ($\partial\mu$), a deep learning-based design paradigm, to aid scientists design new interpretable microscope architectures. Differentiable microscopy first models a common physics-based optical system however with trainable optical elements at key locations on the optical path. Using pre-acquired data, we then train the model end-to-end for a task of interest. The learnt design proposal can then be simplified by interpreting the learnt optical elements. As a first demonstration, based on the optical 4-$f$ system, we present an all-optical quantitative phase microscope (QPM) design that requires no computational post-reconstruction. A follow-up literature survey suggested that the learnt architecture is similar to the generalized phase concept developed two decades ago. We then incorporate the generalized phase contrast concept to simplify the learning procedure. Furthermore, this physical optical setup is miniaturized using a diffractive deep neural network (D2NN). We outperform the existing benchmark for all-optical phase-to-intensity conversion on multiple datasets, and ours is the first demonstration of its kind on D2NNs. The proposed differentiable microscopy framework supplements the creative process of designing new optical systems and would perhaps lead to unconventional but better optical designs.
Design and Development of a Research Oriented Low Cost Robotics Platform with a Novel Dynamic Global Path Planning Approach
Mar 19, 2022
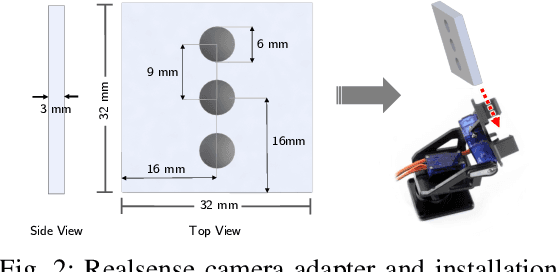
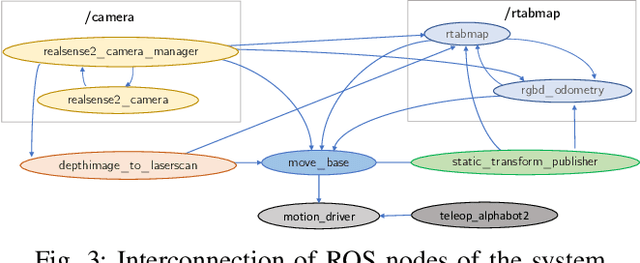
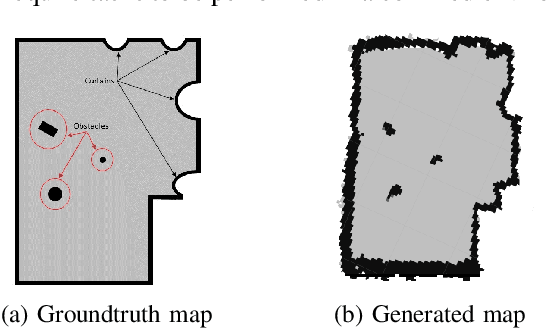
Autonomous navigation systems based on computer vision sensors often require sophisticated robotics platforms which are very expensive. This poses a barrier for the implementation and testing of complex localization, mapping, and navigation algorithms that are vital in robotics applications. Addressing this issue, in this work, Robot Operating System (ROS) supported mobile robotics platforms are compared and an end-to-end implementation of an autonomous navigation system based on a low-cost educational robotics platform, AlphaBot2 is presented, while integrating the Intel RealSense D435 camera. Furthermore, a novel approach to implement dynamic path planners as global path planners in the ROS framework is presented. We evaluate the performance of this approach and highlight the improvements that could be achieved through a dynamic global path planner. This low-cost modified AlphaBot2 robotics platform along with the proposed dynamic global path planning approach will be useful for researchers and students for getting hands-on experience with computer vision-based navigation systems.
A Novel Transfer Learning-Based Approach for Screening Pre-existing Heart Diseases Using Synchronized ECG Signals and Heart Sounds
Feb 14, 2021


Diagnosing pre-existing heart diseases early in life is important as it helps prevent complications such as pulmonary hypertension, heart rhythm problems, blood clots, heart failure and sudden cardiac arrest. To identify such diseases, phonocardiogram (PCG) and electrocardiogram (ECG) waveforms convey important information. Therefore, effectively using these two modalities of data has the potential to improve the disease screening process. We evaluate this hypothesis on a subset of the PhysioNet Challenge 2016 Dataset which contains simultaneously acquired PCG and ECG recordings. Our novel Dual-Convolutional Neural Network based approach uses transfer learning to tackle the problem of having limited amounts of simultaneous PCG and ECG data that is publicly available, while having the potential to adapt to larger datasets. In addition, we introduce two main evaluation frameworks named record-wise and sample-wise evaluation which leads to a rich performance evaluation for the transfer learning approach. Comparisons with methods which used single or dual modality data show that our method can lead to better performance. Furthermore, our results show that individually collected ECG or PCG waveforms are able to provide transferable features which could effectively help to make use of a limited number of synchronized PCG and ECG waveforms and still achieve significant classification performance.