 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAya Dataset: An Open-Access Collection for Multilingual Instruction Tuning
Feb 09, 2024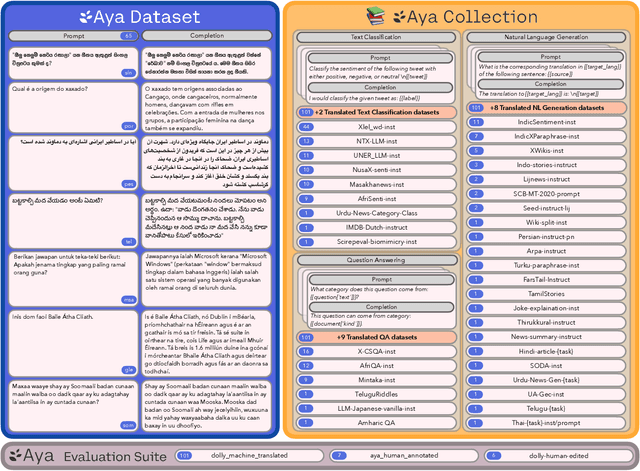
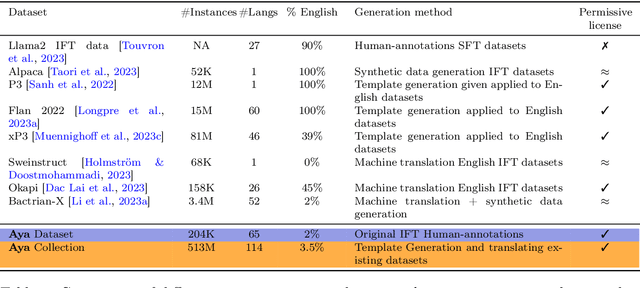
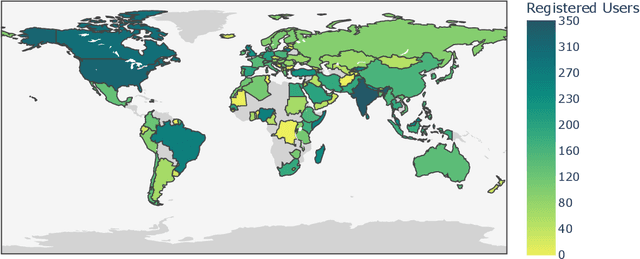
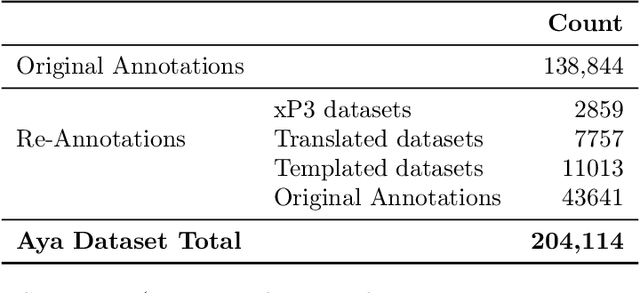
Datasets are foundational to many breakthroughs in modern artificial intelligence. Many recent achievements in the space of natural language processing (NLP) can be attributed to the finetuning of pre-trained models on a diverse set of tasks that enables a large language model (LLM) to respond to instructions. Instruction fine-tuning (IFT) requires specifically constructed and annotated datasets. However, existing datasets are almost all in the English language. In this work, our primary goal is to bridge the language gap by building a human-curated instruction-following dataset spanning 65 languages. We worked with fluent speakers of languages from around the world to collect natural instances of instructions and completions. Furthermore, we create the most extensive multilingual collection to date, comprising 513 million instances through templating and translating existing datasets across 114 languages. In total, we contribute four key resources: we develop and open-source the Aya Annotation Platform, the Aya Dataset, the Aya Collection, and the Aya Evaluation Suite. The Aya initiative also serves as a valuable case study in participatory research, involving collaborators from 119 countries. We see this as a valuable framework for future research collaborations that aim to bridge gaps in resources.
ROMANO: A Novel Overlay Lightweight Communication Protocol for Unified Control and Sensing of a Network of Robots
Sep 22, 2017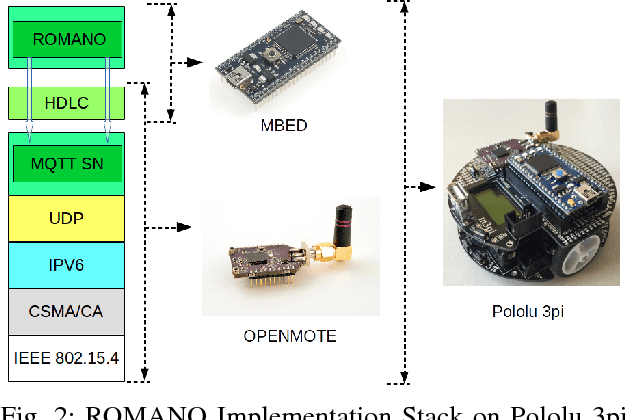
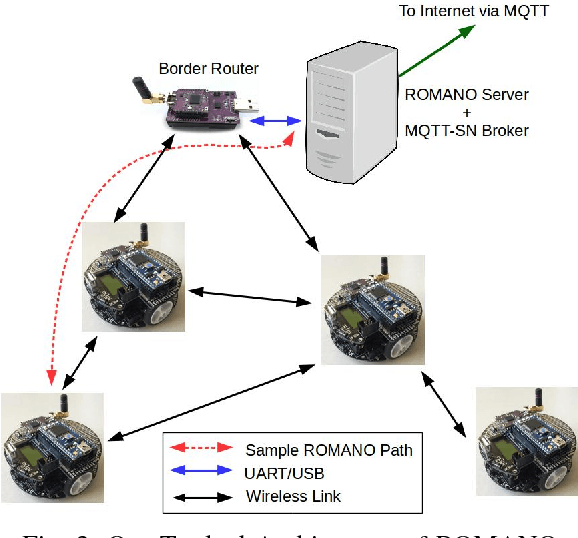
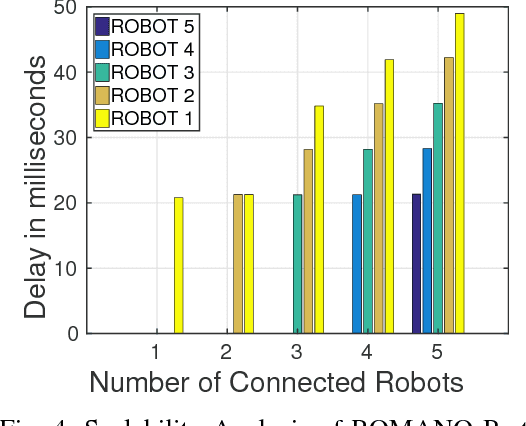
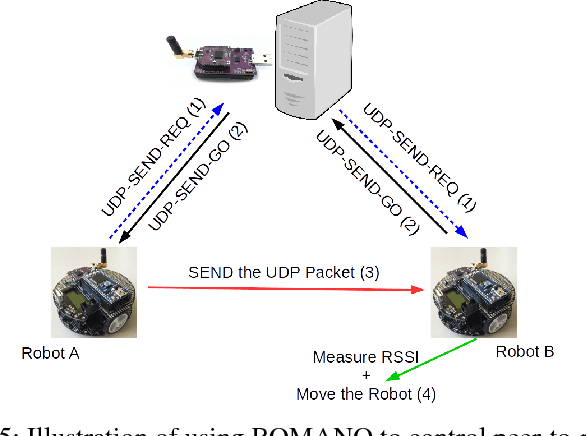
We present the Robotic Overlay coMmunicAtioN prOtocol (ROMANO), a lightweight, application layer overlay communication protocol for a unified sensing and control abstraction of a network of heterogeneous robots mainly consisting of low power, low-compute-capable robots. ROMANO is built to work in conjunction with the well-known MQ Telemetry Transport for Sensor Nodes (MQTT-SN) protocol, a lightweight publish-subscribe communication protocol for the Internet of Things and makes use its concept of "topics" to designate the addition and deletion of communication endpoints by changing the subscriptions of topics at each device. We also develop a portable implementation of ROMANO for low power IEEE 802.15.4 (Zigbee) radios and deployed it on a small testbed of commercially available, low-power, and low-compute-capable robots called Pololu 3pi robots. Based on a thorough analysis of the protocol on the real testbed, as a measure of throughput, we demonstrate that ROMANO can guarantee more than a $99.5\%$ message delivery ratio for a message generation rate up to 200 messages per second. The single hop delays in ROMANO are as low as 20ms with linear dependency on the number of robots connected. These delay numbers concur with typical delays in 802.15.4 networks and suggest that ROMANO does not introduce additional delays. Lastly, we implement four different multi-robot applications to demonstrate the scalability, adaptability, ease of integration, and reliability of ROMANO.