 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Localizing a Camera from a Single Image
Mar 24, 2020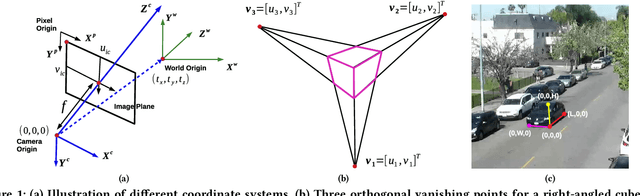
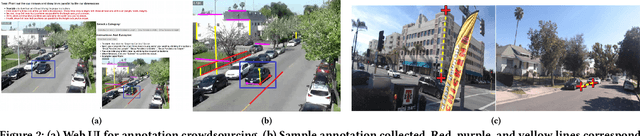
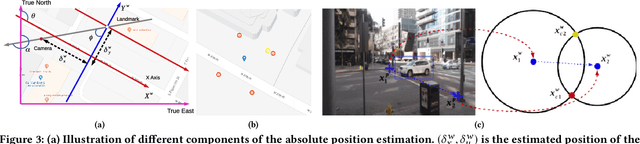
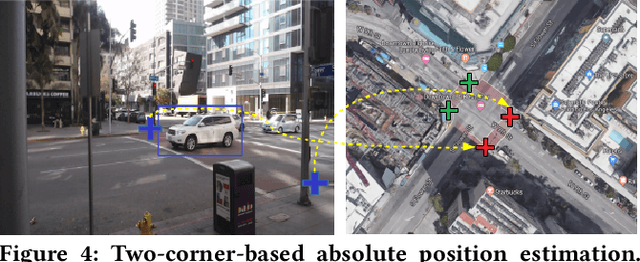
Public cameras often have limited metadata describing their attributes. A key missing attribute is the precise location of the camera, using which it is possible to precisely pinpoint the location of events seen in the camera. In this paper, we explore the following question: under what conditions is it possible to estimate the location of a camera from a single image taken by the camera? We show that, using a judicious combination of projective geometry, neural networks, and crowd-sourced annotations from human workers, it is possible to position 95% of the images in our test data set to within 12 m. This performance is two orders of magnitude better than PoseNet, a state-of-the-art neural network that, when trained on a large corpus of images in an area, can estimate the pose of a single image. Finally, we show that the camera's inferred position and intrinsic parameters can help design a number of virtual sensors, all of which are reasonably accurate.
Robotic Wireless Sensor Networks
Sep 02, 2018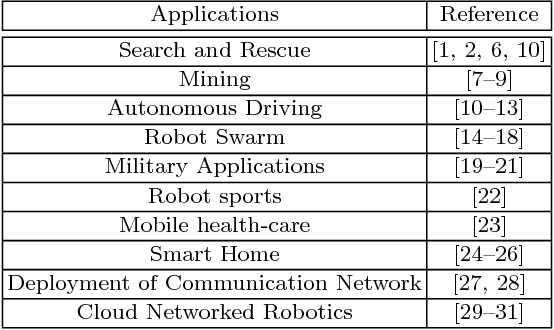
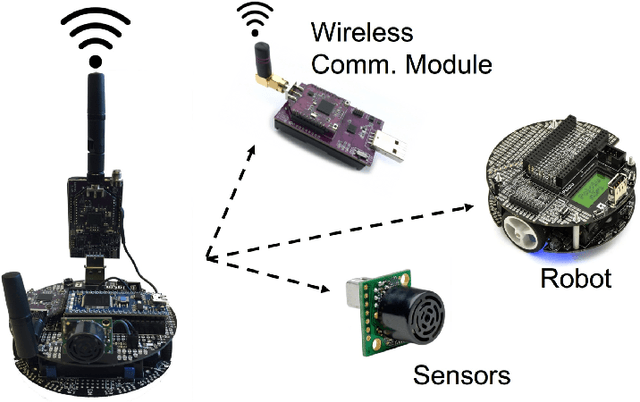
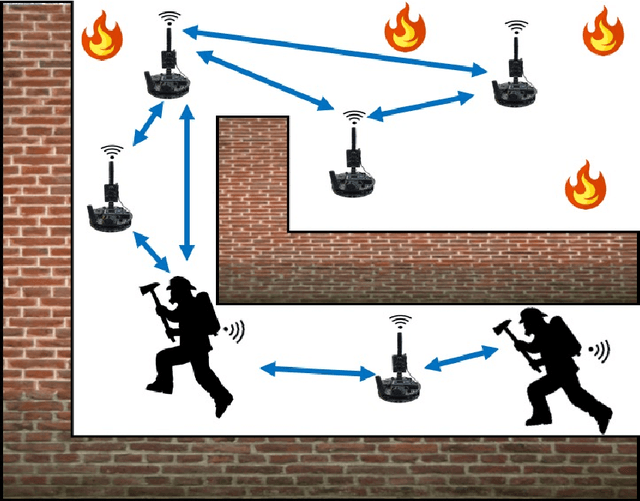
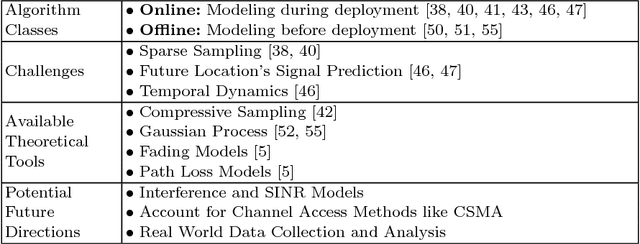
In this chapter, we present a literature survey of an emerging, cutting-edge, and multi-disciplinary field of research at the intersection of Robotics and Wireless Sensor Networks (WSN) which we refer to as Robotic Wireless Sensor Networks (RWSN). We define a RWSN as an autonomous networked multi-robot system that aims to achieve certain sensing goals while meeting and maintaining certain communication performance requirements, through cooperative control, learning and adaptation. While both of the component areas, i.e., Robotics and WSN, are very well-known and well-explored, there exist a whole set of new opportunities and research directions at the intersection of these two fields which are relatively or even completely unexplored. One such example would be the use of a set of robotic routers to set up a temporary communication path between a sender and a receiver that uses the controlled mobility to the advantage of packet routing. We find that there exist only a limited number of articles to be directly categorized as RWSN related works whereas there exist a range of articles in the robotics and the WSN literature that are also relevant to this new field of research. To connect the dots, we first identify the core problems and research trends related to RWSN such as connectivity, localization, routing, and robust flow of information. Next, we classify the existing research on RWSN as well as the relevant state-of-the-arts from robotics and WSN community according to the problems and trends identified in the first step. Lastly, we analyze what is missing in the existing literature, and identify topics that require more research attention in the future.
ARREST: A RSSI Based Approach for Mobile Sensing and Tracking of a Moving Object
Oct 24, 2017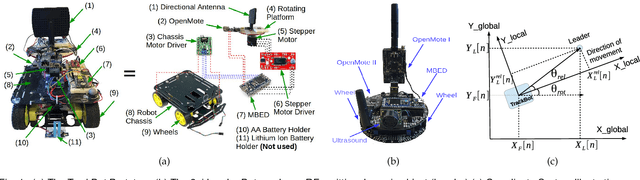

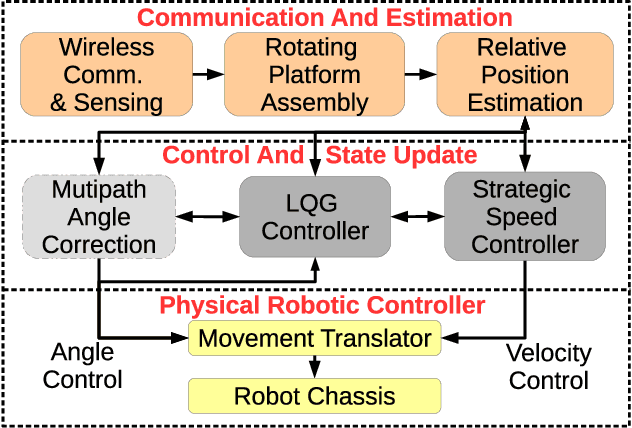
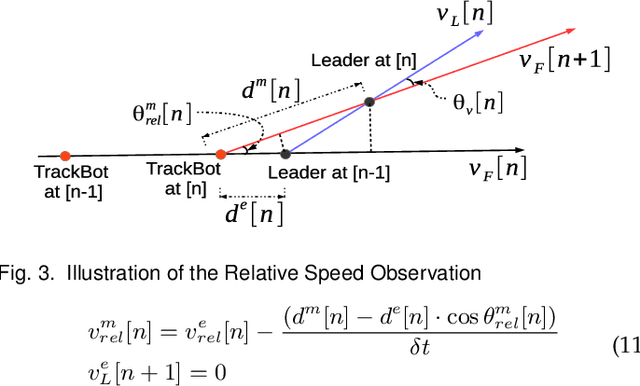
We present Autonomous Rssi based RElative poSitioning and Tracking (ARREST), a new robotic sensing system for tracking and following a moving, RF-emitting object, which we refer to as the Leader, solely based on signal strength information. This kind of system can expand the horizon of autonomous mobile tracking and distributed robotics into many scenarios with limited visibility such as nighttime, dense forests, and cluttered environments. Our proposed tracking agent, which we refer to as the TrackBot, uses a single rotating, off-the-shelf, directional antenna, novel angle and relative speed estimation algorithms, and Kalman filtering to continually estimate the relative position of the Leader with decimeter level accuracy (which is comparable to a state-of-the-art multiple access point based RF-localization system) and the relative speed of the Leader with accuracy on the order of 1 m/s. The TrackBot feeds the relative position and speed estimates into a Linear Quadratic Gaussian (LQG) controller to generate a set of control outputs to control the orientation and the movement of the TrackBot. We perform an extensive set of real world experiments with a full-fledged prototype to demonstrate that the TrackBot is able to stay within 5m of the Leader with: (1) more than $99\%$ probability in line of sight scenarios, and (2) more than $70\%$ probability in no line of sight scenarios, when it moves 1.8X faster than the Leader. For ground truth estimation in real world experiments, we also developed an integrated TDoA based distance and angle estimation system with centimeter level localization accuracy in line of sight scenarios. While providing a first proof of concept, our work opens the door to future research aimed at further improvements of autonomous RF-based tracking.
ROMANO: A Novel Overlay Lightweight Communication Protocol for Unified Control and Sensing of a Network of Robots
Sep 22, 2017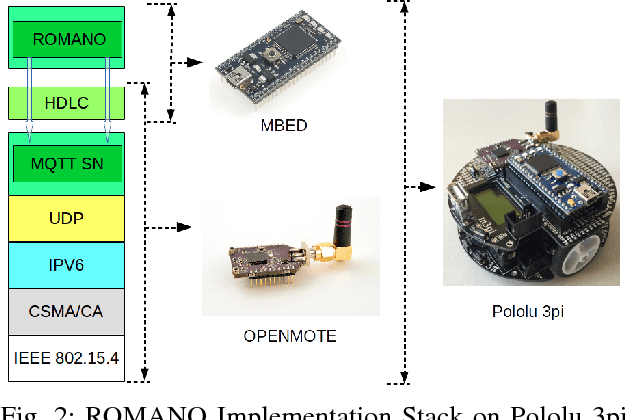
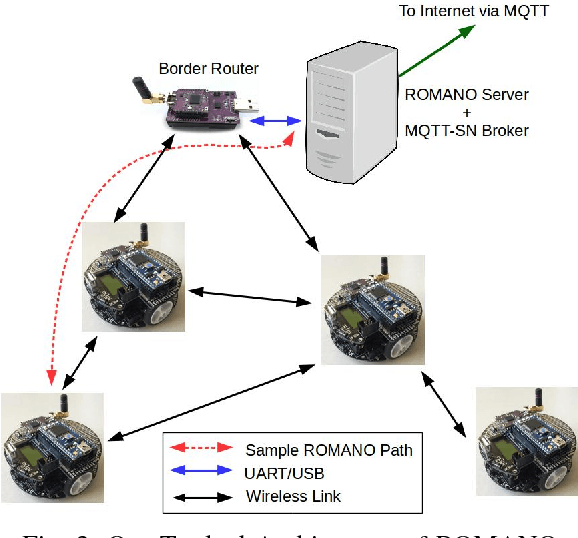
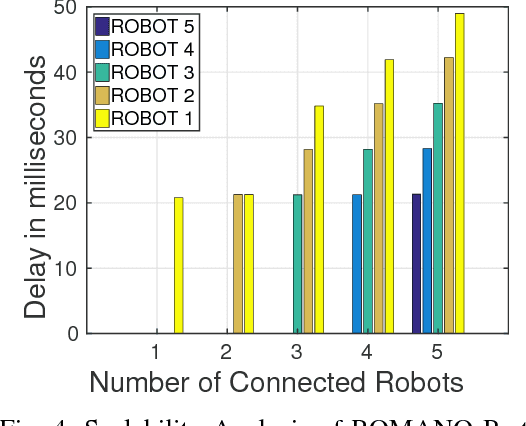
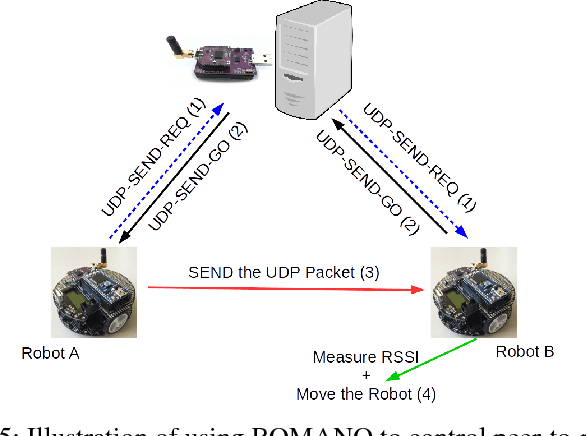
We present the Robotic Overlay coMmunicAtioN prOtocol (ROMANO), a lightweight, application layer overlay communication protocol for a unified sensing and control abstraction of a network of heterogeneous robots mainly consisting of low power, low-compute-capable robots. ROMANO is built to work in conjunction with the well-known MQ Telemetry Transport for Sensor Nodes (MQTT-SN) protocol, a lightweight publish-subscribe communication protocol for the Internet of Things and makes use its concept of "topics" to designate the addition and deletion of communication endpoints by changing the subscriptions of topics at each device. We also develop a portable implementation of ROMANO for low power IEEE 802.15.4 (Zigbee) radios and deployed it on a small testbed of commercially available, low-power, and low-compute-capable robots called Pololu 3pi robots. Based on a thorough analysis of the protocol on the real testbed, as a measure of throughput, we demonstrate that ROMANO can guarantee more than a $99.5\%$ message delivery ratio for a message generation rate up to 200 messages per second. The single hop delays in ROMANO are as low as 20ms with linear dependency on the number of robots connected. These delay numbers concur with typical delays in 802.15.4 networks and suggest that ROMANO does not introduce additional delays. Lastly, we implement four different multi-robot applications to demonstrate the scalability, adaptability, ease of integration, and reliability of ROMANO.
Interference Power Bound Analysis of a Network of Wireless Robots
Nov 23, 2016
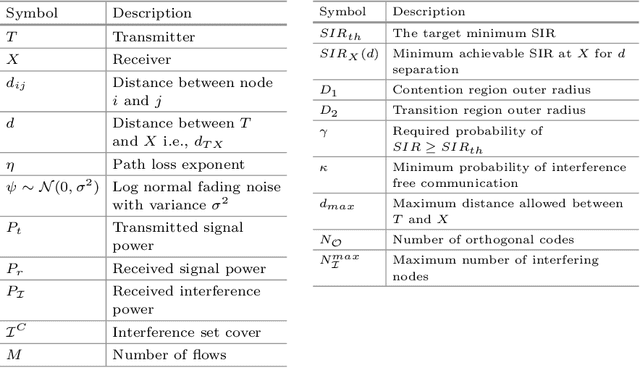
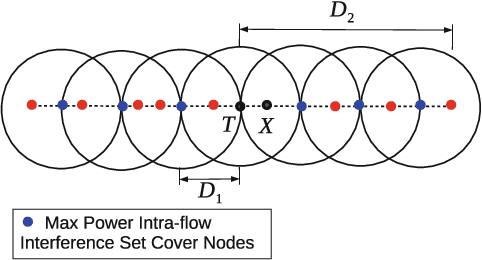
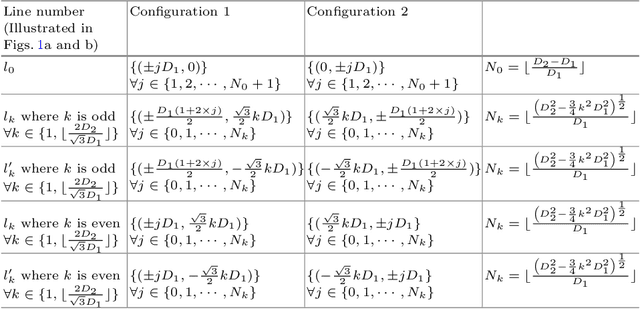
We consider a fundamental problem concerning the deployment of a wireless robotic network: to fulfill various end-to-end performance requirements, a "sufficient" number of robotic relays must be deployed to ensure that links are of acceptable quality. Prior work has not addressed how to find this number. We use the properties of Carrier Sense Multiple Access (CSMA) based wireless communication to derive an upper bound on the spacing between any transmitter-receiver pair, which directly translates to a lower bound on the number of robots to deploy. We focus on SINR-based performance requirements due to their wide applicability. Next, we show that the bound can be improved by exploiting the geometrical structure of a network, such as linearity in the case of flow-based robotic router networks. Furthermore, we also use the bound on robot count to formulate a lower bound on the number of orthogonal codes required for a high probability of interference free communication. We demonstrate and validate our proposed bounds through simulations.
Towards Controllability of Wireless Network Quality using Mobile Robotic Routers
Jul 26, 2016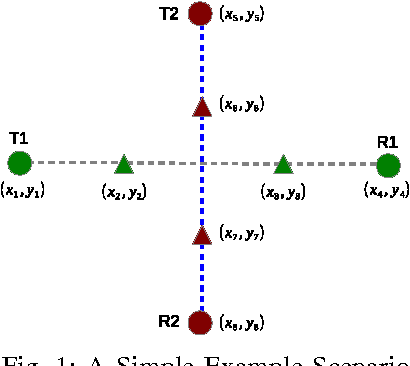
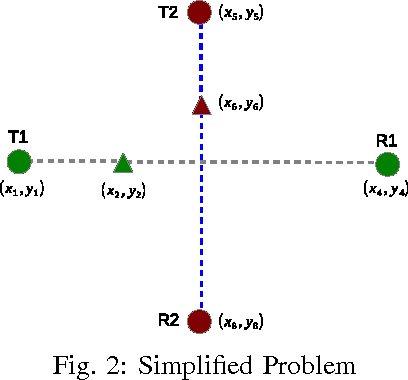
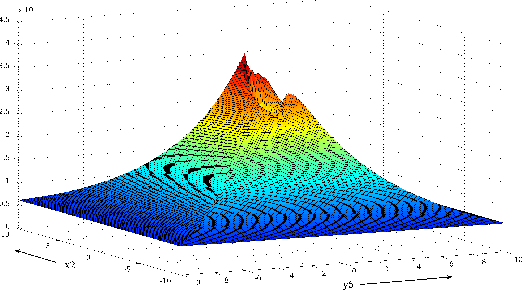
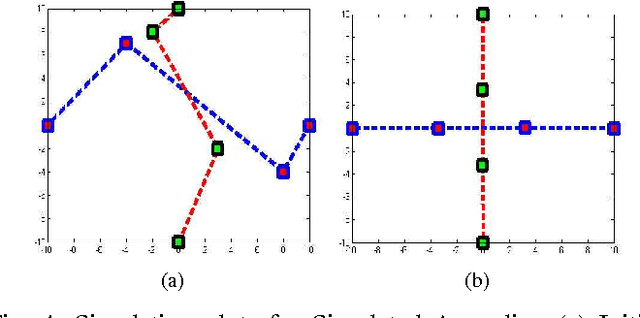
We consider a problem of robotic router placement and mobility control with the objective of formation and maintenance of an optimal communication network between a set of transmitter-receiver pairs. In this scenario, the communication path between any transmitter-receiver pair contains a predetermined set of mobile robotic routers nodes. The goal of this work is to design an algorithm to optimize the positions of the robotic nodes to improve the overall performance of the network. We define the optimization metric to be the minimum of the Signal to Interference plus Noise Ratios (SINR) over all the links. In this manuscript, we propose two optimization algorithms to solve this problem in a centralized and a decentralized manner, respectively.We also demonstrate the performances of both algorithms based on a set of simulation experiments.