 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARREST: A RSSI Based Approach for Mobile Sensing and Tracking of a Moving Object
Paper and Code
Oct 24, 2017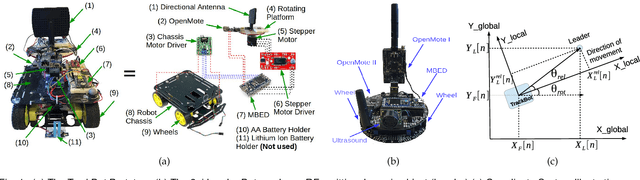

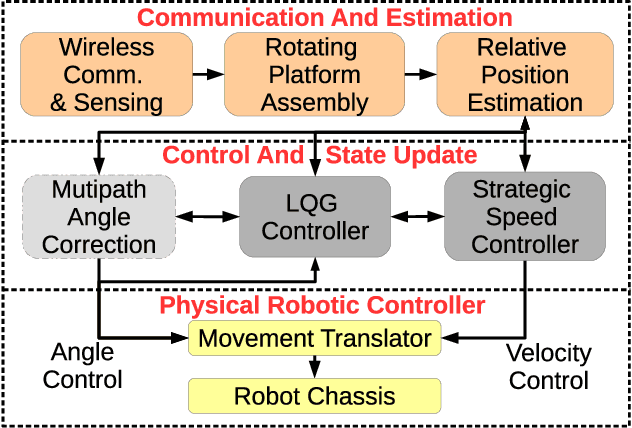
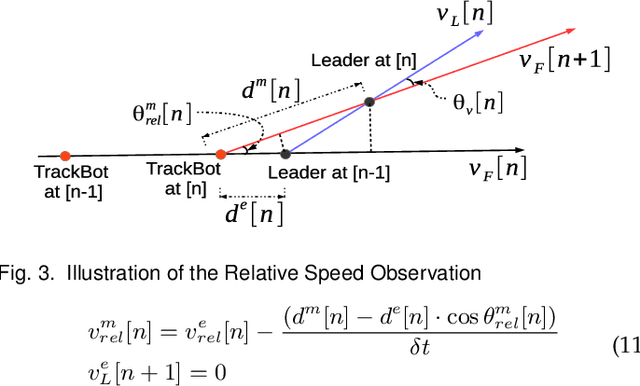
We present Autonomous Rssi based RElative poSitioning and Tracking (ARREST), a new robotic sensing system for tracking and following a moving, RF-emitting object, which we refer to as the Leader, solely based on signal strength information. This kind of system can expand the horizon of autonomous mobile tracking and distributed robotics into many scenarios with limited visibility such as nighttime, dense forests, and cluttered environments. Our proposed tracking agent, which we refer to as the TrackBot, uses a single rotating, off-the-shelf, directional antenna, novel angle and relative speed estimation algorithms, and Kalman filtering to continually estimate the relative position of the Leader with decimeter level accuracy (which is comparable to a state-of-the-art multiple access point based RF-localization system) and the relative speed of the Leader with accuracy on the order of 1 m/s. The TrackBot feeds the relative position and speed estimates into a Linear Quadratic Gaussian (LQG) controller to generate a set of control outputs to control the orientation and the movement of the TrackBot. We perform an extensive set of real world experiments with a full-fledged prototype to demonstrate that the TrackBot is able to stay within 5m of the Leader with: (1) more than $99\%$ probability in line of sight scenarios, and (2) more than $70\%$ probability in no line of sight scenarios, when it moves 1.8X faster than the Leader. For ground truth estimation in real world experiments, we also developed an integrated TDoA based distance and angle estimation system with centimeter level localization accuracy in line of sight scenarios. While providing a first proof of concept, our work opens the door to future research aimed at further improvements of autonomous RF-based tracking.