 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARREST: A RSSI Based Approach for Mobile Sensing and Tracking of a Moving Object
Oct 24, 2017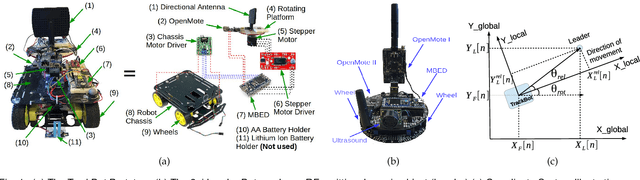

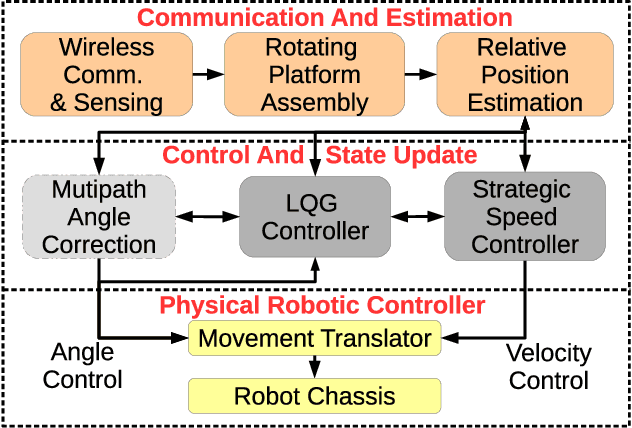
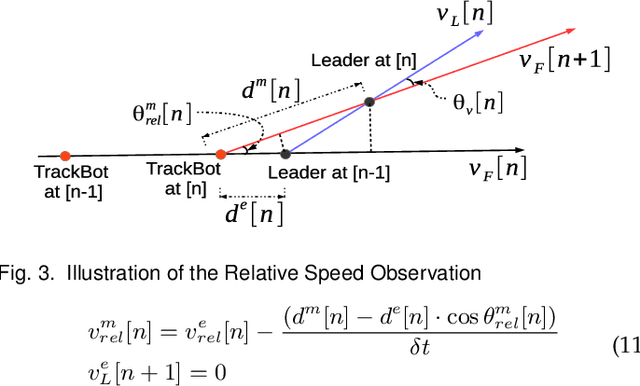
We present Autonomous Rssi based RElative poSitioning and Tracking (ARREST), a new robotic sensing system for tracking and following a moving, RF-emitting object, which we refer to as the Leader, solely based on signal strength information. This kind of system can expand the horizon of autonomous mobile tracking and distributed robotics into many scenarios with limited visibility such as nighttime, dense forests, and cluttered environments. Our proposed tracking agent, which we refer to as the TrackBot, uses a single rotating, off-the-shelf, directional antenna, novel angle and relative speed estimation algorithms, and Kalman filtering to continually estimate the relative position of the Leader with decimeter level accuracy (which is comparable to a state-of-the-art multiple access point based RF-localization system) and the relative speed of the Leader with accuracy on the order of 1 m/s. The TrackBot feeds the relative position and speed estimates into a Linear Quadratic Gaussian (LQG) controller to generate a set of control outputs to control the orientation and the movement of the TrackBot. We perform an extensive set of real world experiments with a full-fledged prototype to demonstrate that the TrackBot is able to stay within 5m of the Leader with: (1) more than $99\%$ probability in line of sight scenarios, and (2) more than $70\%$ probability in no line of sight scenarios, when it moves 1.8X faster than the Leader. For ground truth estimation in real world experiments, we also developed an integrated TDoA based distance and angle estimation system with centimeter level localization accuracy in line of sight scenarios. While providing a first proof of concept, our work opens the door to future research aimed at further improvements of autonomous RF-based tracking.
ROMANO: A Novel Overlay Lightweight Communication Protocol for Unified Control and Sensing of a Network of Robots
Sep 22, 2017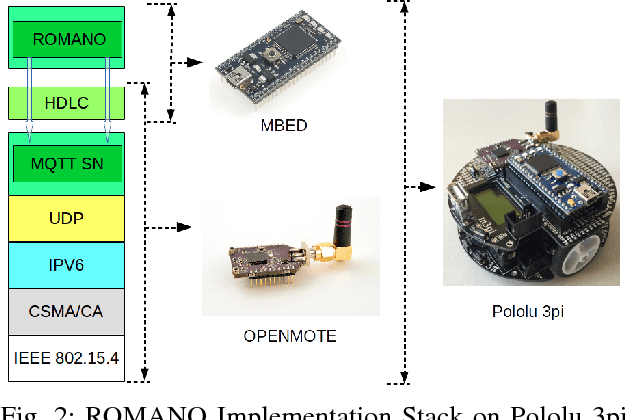
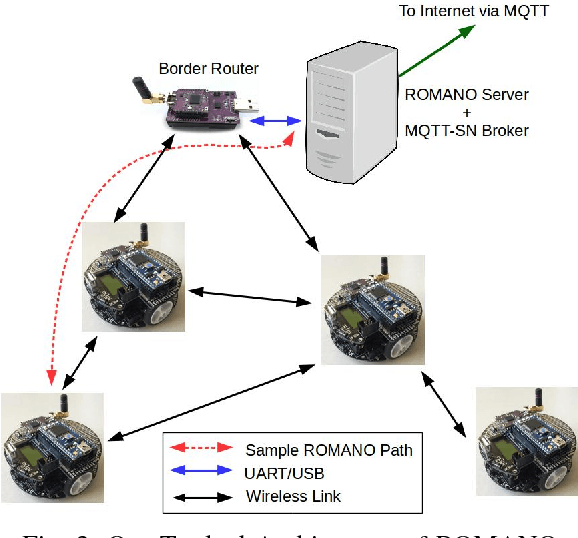
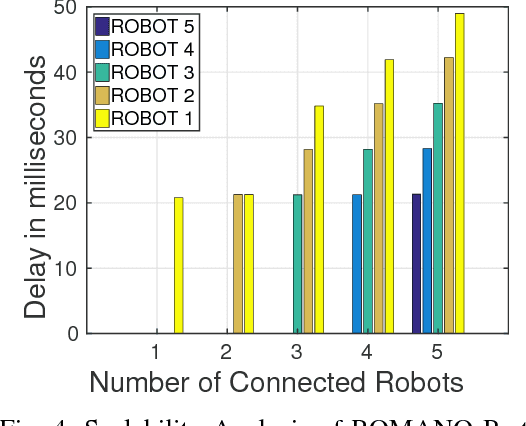
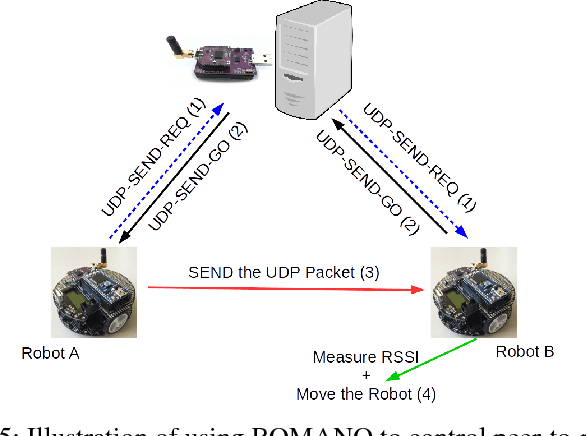
We present the Robotic Overlay coMmunicAtioN prOtocol (ROMANO), a lightweight, application layer overlay communication protocol for a unified sensing and control abstraction of a network of heterogeneous robots mainly consisting of low power, low-compute-capable robots. ROMANO is built to work in conjunction with the well-known MQ Telemetry Transport for Sensor Nodes (MQTT-SN) protocol, a lightweight publish-subscribe communication protocol for the Internet of Things and makes use its concept of "topics" to designate the addition and deletion of communication endpoints by changing the subscriptions of topics at each device. We also develop a portable implementation of ROMANO for low power IEEE 802.15.4 (Zigbee) radios and deployed it on a small testbed of commercially available, low-power, and low-compute-capable robots called Pololu 3pi robots. Based on a thorough analysis of the protocol on the real testbed, as a measure of throughput, we demonstrate that ROMANO can guarantee more than a $99.5\%$ message delivery ratio for a message generation rate up to 200 messages per second. The single hop delays in ROMANO are as low as 20ms with linear dependency on the number of robots connected. These delay numbers concur with typical delays in 802.15.4 networks and suggest that ROMANO does not introduce additional delays. Lastly, we implement four different multi-robot applications to demonstrate the scalability, adaptability, ease of integration, and reliability of ROMANO.