 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndustrial3D: A Terrestrial LiDAR Point Cloud Dataset and CrossParadigm Benchmark for Industrial Infrastructure
Mar 30, 2026Automated semantic understanding of dense point clouds is a prerequisite for Scan-to-BIM pipelines, digital twin construction, and as-built verification--core tasks in the digital transformation of the construction industry. Yet for industrial mechanical, electrical, and plumbing (MEP) facilities, this challenge remains largely unsolved: TLS acquisitions of water treatment plants, chiller halls, and pumping stations exhibit extreme geometric ambiguity, severe occlusion, and extreme class imbalance that architectural benchmarks (e.g., S3DIS or ScanNet) cannot adequately represent. We present Industrial3D, a terrestrial LiDAR dataset comprising 612 million expertly labelled points at 6 mm resolution from 13 water treatment facilities. At 6.6x the scale of the closest comparable MEP dataset, Industrial3D provides the largest and most demanding testbed for industrial 3D scene understanding to date. We further establish the first industrial cross-paradigm benchmark, evaluating nine representative methods across fully supervised, weakly supervised, unsupervised, and foundation model settings under a unified benchmark protocol. The best supervised method achieves 55.74% mIoU, whereas zero-shot Point-SAM reaches only 15.79%--a 39.95 percentage-point gap that quantifies the unresolved domain-transfer challenge for industrial TLS data. Systematic analysis reveals that this gap originates from a dual crisis: statistical rarity (215:1 imbalance, 3.5x more severe than S3DIS) and geometric ambiguity (tail-class points share cylindrical primitives with head-class pipes) that frequency-based re-weighting alone cannot resolve. Industrial3D, along with benchmark code and pre-trained models, will be publicly available at https://github.com/pointcloudyc/Industrial3D.
Resolving Primitive-Sharing Ambiguity in Long-Tailed Industrial Point Cloud Segmentation via Spatial Context Constraints
Jan 27, 2026Industrial point cloud segmentation for Digital Twin construction faces a persistent challenge: safety-critical components such as reducers and valves are systematically misclassified. These failures stem from two compounding factors: such components are rare in training data, yet they share identical local geometry with dominant structures like pipes. This work identifies a dual crisis unique to industrial 3D data extreme class imbalance 215:1 ratio compounded by geometric ambiguity where most tail classes share cylindrical primitives with head classes. Existing frequency-based re-weighting methods address statistical imbalance but cannot resolve geometric ambiguity. We propose spatial context constraints that leverage neighborhood prediction consistency to disambiguate locally similar structures. Our approach extends the Class-Balanced (CB) Loss framework with two architecture-agnostic mechanisms: (1) Boundary-CB, an entropy-based constraint that emphasizes ambiguous boundaries, and (2) Density-CB, a density-based constraint that compensates for scan-dependent variations. Both integrate as plug-and-play modules without network modifications, requiring only loss function replacement. On the Industrial3D dataset (610M points from water treatment facilities), our method achieves 55.74% mIoU with 21.7% relative improvement on tail-class performance (29.59% vs. 24.32% baseline) while preserving head-class accuracy (88.14%). Components with primitive-sharing ambiguity show dramatic gains: reducer improves from 0% to 21.12% IoU; valve improves by 24.3% relative. This resolves geometric ambiguity without the typical head-tail trade-off, enabling reliable identification of safety-critical components for automated knowledge extraction in Digital Twin applications.
Sequential Treatment Effect Estimation with Unmeasured Confounders
May 14, 2025



This paper studies the cumulative causal effects of sequential treatments in the presence of unmeasured confounders. It is a critical issue in sequential decision-making scenarios where treatment decisions and outcomes dynamically evolve over time. Advanced causal methods apply transformer as a backbone to model such time sequences, which shows superiority in capturing long time dependence and periodic patterns via attention mechanism. However, even they control the observed confounding, these estimators still suffer from unmeasured confounders, which influence both treatment assignments and outcomes. How to adjust the latent confounding bias in sequential treatment effect estimation remains an open challenge. Therefore, we propose a novel Decomposing Sequential Instrumental Variable framework for CounterFactual Regression (DSIV-CFR), relying on a common negative control assumption. Specifically, an instrumental variable (IV) is a special negative control exposure, while the previous outcome serves as a negative control outcome. This allows us to recover the IVs latent in observation variables and estimate sequential treatment effects via a generalized moment condition. We conducted experiments on 4 datasets and achieved significant performance in one- and multi-step prediction, supported by which we can identify optimal treatments for dynamic systems.
FedLED: Label-Free Equipment Fault Diagnosis with Vertical Federated Transfer Learning
Dec 29, 2023



Intelligent equipment fault diagnosis based on Federated Transfer Learning (FTL) attracts considerable attention from both academia and industry. It allows real-world industrial agents with limited samples to construct a fault diagnosis model without jeopardizing their raw data privacy. Existing approaches, however, can neither address the intense sample heterogeneity caused by different working conditions of practical agents, nor the extreme fault label scarcity, even zero, of newly deployed equipment. To address these issues, we present FedLED, the first unsupervised vertical FTL equipment fault diagnosis method, where knowledge of the unlabeled target domain is further exploited for effective unsupervised model transfer. Results of extensive experiments using data of real equipment monitoring demonstrate that FedLED obviously outperforms SOTA approaches in terms of both diagnosis accuracy (up to 4.13 times) and generality. We expect our work to inspire further study on label-free equipment fault diagnosis systematically enhanced by target domain knowledge.
Full State Estimation of Soft Robots From Tip Velocities: A Cosserat-Theoretic Boundary Observer
Mar 10, 2023Soft robotics is a rapidly growing research area in robotics. Sensing of robotic systems is important for designing feedback controllers which usually provide robustness to modeling uncertainties. Sensing of soft robots, however, is considered a challenging task because theoretically, soft robots have infinite degrees of freedom while existing sensors only provide a limited number of measurements. One solution to this challenge is to design an observer/filter to estimate the unknown states from the sensor measurements. In this work, we design a boundary observer for soft robots based on the well-known Cosserat rod theory which models soft robots by nonlinear partial differential equations (PDEs). This boundary observer is able to estimate all the continuous robot states (poses, strains, and velocities) using the PDE model, inputs, and only tip velocity measurements (which explains the name "boundary" observer). The key idea is to inject sequential tip velocity measurements into the observer in a way that dissipates the energy of state estimation errors through the boundary. This boundary observer only requires sensing the tip velocity, can be implemented by simply changing a boundary condition in any numerical solvers of Cosserat rod models, and is proven to be locally input-to-state stable. Simulation studies are included and suggest that the domain of attraction is large and the observer is robust to measurement noise.
Task Space Tracking of Soft Manipulators: Inner-Outer Loop Control Based on Cosserat-Rod Models
Oct 03, 2022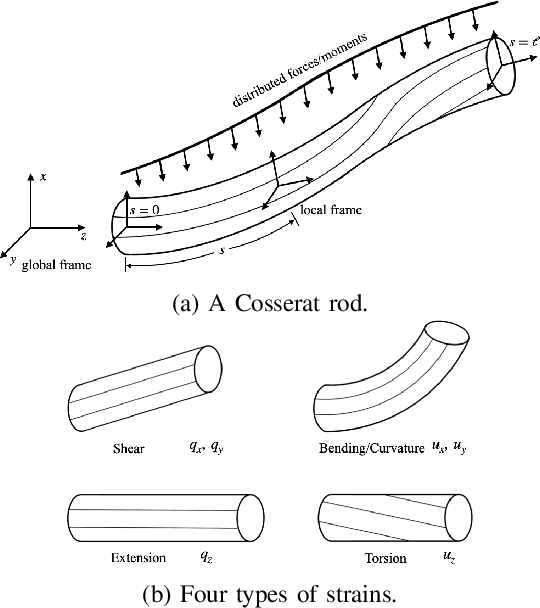

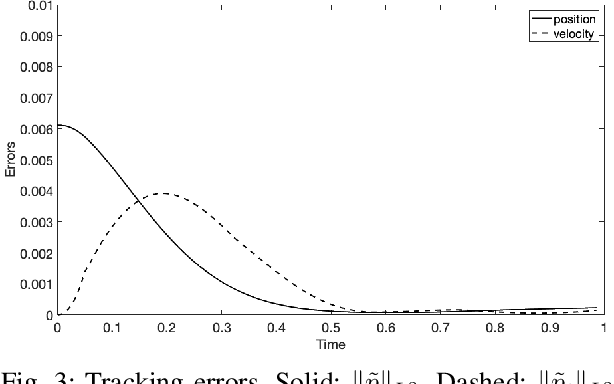
Soft robots are robotic systems made of deformable materials and exhibit unique flexibility that can be exploited for complex environments and tasks. However, their control problem has been considered a challenging subject because they are of infinite degrees of freedom and highly under-actuated. Existing studies have mainly relied on simplified and approximated finite-dimensional models. In this work, we exploit infinite-dimensional nonlinear control for soft robots. We adopt the Cosserat-rod theory and employ nonlinear partial differential equations (PDEs) to model the kinematics and dynamics of soft manipulators, including their translational motions (for shear and elongation) and rotational motions (for bending and torsion). The objective is to achieve position tracking of the whole manipulator in a planar task space by controlling the moments (generated by actuators). The control design is inspired by the energy decay property of damped wave equations and has an inner-outer loop structure. In the outer loop, we design desired rotational motions that rotate the translational component into a direction that asymptotically dissipates the energy associated with position tracking errors. In the inner loop, we design inputs for the rotational components to track their desired motions, again by dissipating the rotational energy. We prove that the closed-loop system is exponentially stable and evaluate its performance through simulations.
Latent Dirichlet Allocation Model Training with Differential Privacy
Oct 09, 2020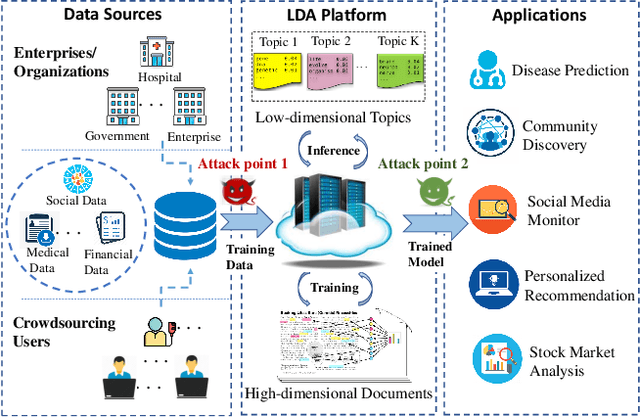
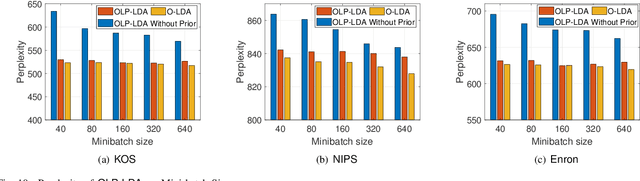
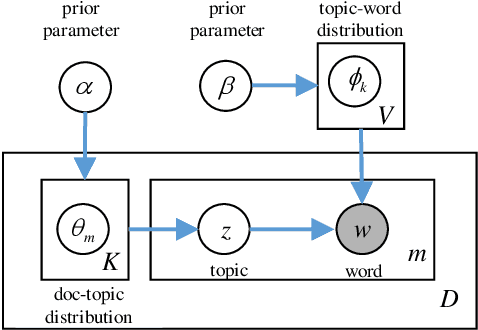
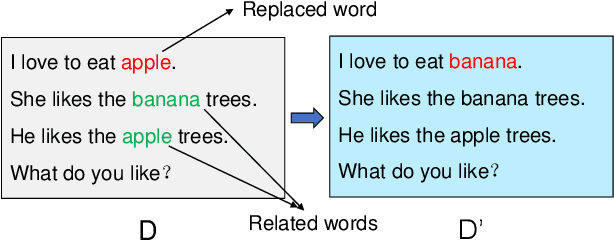
Latent Dirichlet Allocation (LDA) is a popular topic modeling technique for hidden semantic discovery of text data and serves as a fundamental tool for text analysis in various applications. However, the LDA model as well as the training process of LDA may expose the text information in the training data, thus bringing significant privacy concerns. To address the privacy issue in LDA, we systematically investigate the privacy protection of the main-stream LDA training algorithm based on Collapsed Gibbs Sampling (CGS) and propose several differentially private LDA algorithms for typical training scenarios. In particular, we present the first theoretical analysis on the inherent differential privacy guarantee of CGS based LDA training and further propose a centralized privacy-preserving algorithm (HDP-LDA) that can prevent data inference from the intermediate statistics in the CGS training. Also, we propose a locally private LDA training algorithm (LP-LDA) on crowdsourced data to provide local differential privacy for individual data contributors. Furthermore, we extend LP-LDA to an online version as OLP-LDA to achieve LDA training on locally private mini-batches in a streaming setting. Extensive analysis and experiment results validate both the effectiveness and efficiency of our proposed privacy-preserving LDA training algorithms.
OL4EL: Online Learning for Edge-cloud Collaborative Learning on Heterogeneous Edges with Resource Constraints
Apr 23, 2020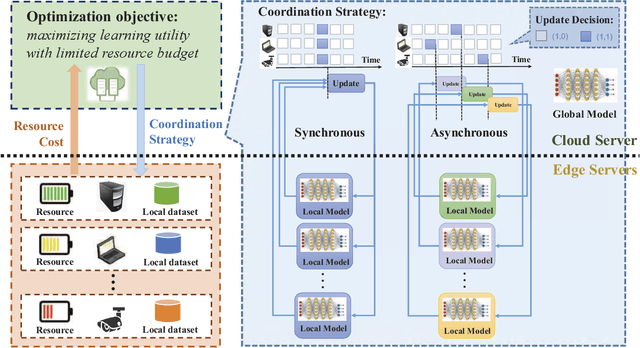
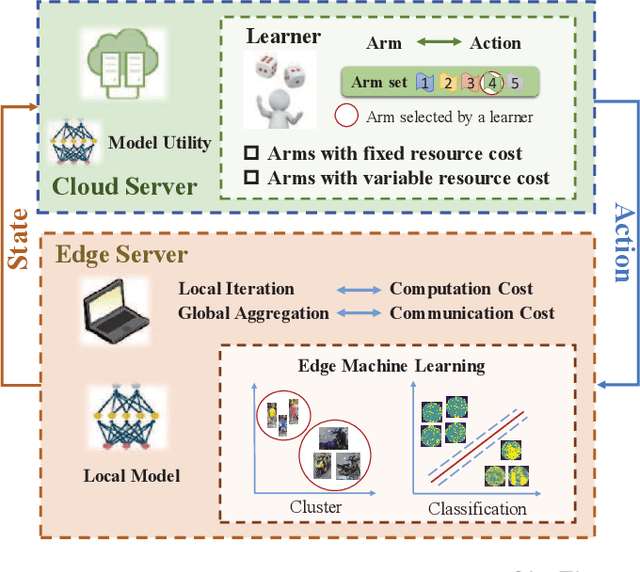
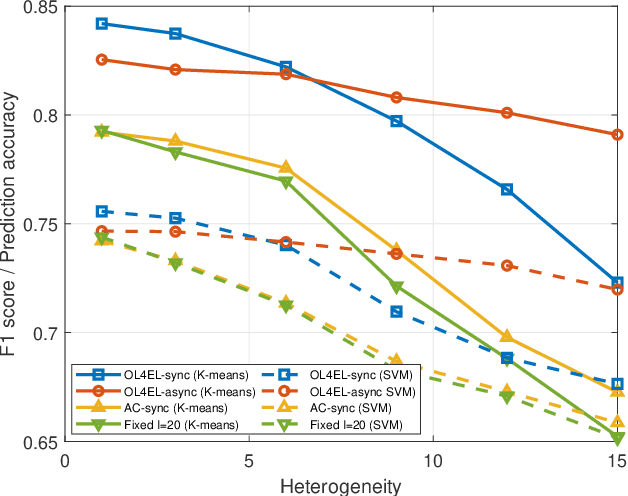
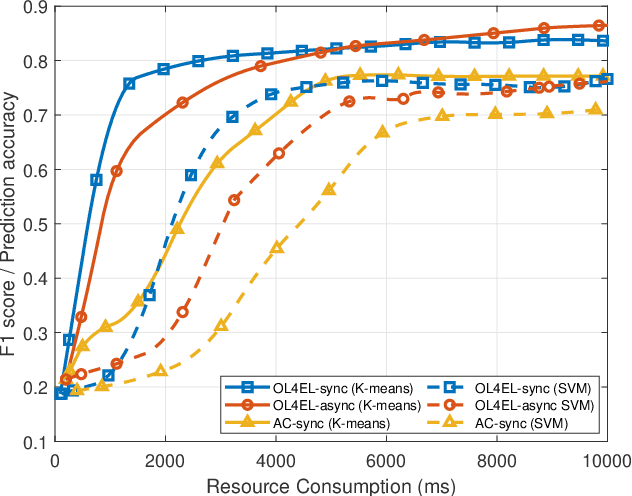
Distributed machine learning (ML) at network edge is a promising paradigm that can preserve both network bandwidth and privacy of data providers. However, heterogeneous and limited computation and communication resources on edge servers (or edges) pose great challenges on distributed ML and formulate a new paradigm of Edge Learning (i.e. edge-cloud collaborative machine learning). In this article, we propose a novel framework of 'learning to learn' for effective Edge Learning (EL) on heterogeneous edges with resource constraints. We first model the dynamic determination of collaboration strategy (i.e. the allocation of local iterations at edge servers and global aggregations on the Cloud during collaborative learning process) as an online optimization problem to achieve the tradeoff between the performance of EL and the resource consumption of edge servers. Then, we propose an Online Learning for EL (OL4EL) framework based on the budget-limited multi-armed bandit model. OL4EL supports both synchronous and asynchronous learning patterns, and can be used for both supervised and unsupervised learning tasks. To evaluate the performance of OL4EL, we conducted both real-world testbed experiments and extensive simulations based on docker containers, where both Support Vector Machine and K-means were considered as use cases. Experimental results demonstrate that OL4EL significantly outperforms state-of-the-art EL and other collaborative ML approaches in terms of the trade-off between learning performance and resource consumption.
Leak Event Identification in Water Systems Using High Order CRF
Mar 12, 2017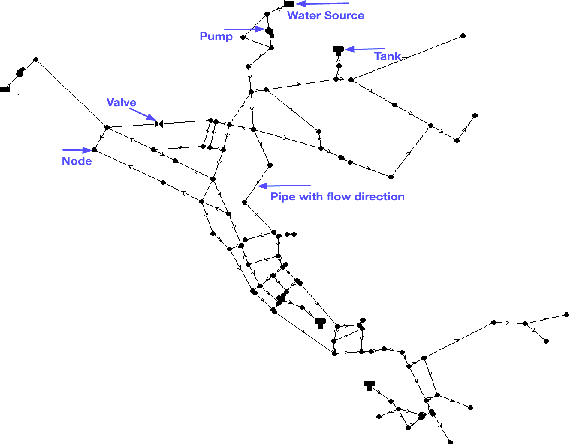
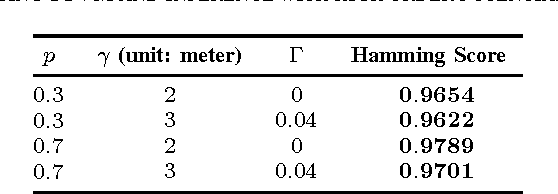
Today, detection of anomalous events in civil infrastructures (e.g. water pipe breaks and leaks) is time consuming and often takes hours or days. Pipe breakage as one of the most frequent types of failure of water networks often causes community disruptions ranging from temporary interruptions in services to extended loss of business and relocation of residents. In this project, we design and implement a two-phase approach for leak event identification, which leverages dynamic data from multiple information sources including IoT sensing data (pressure values and/or flow rates), geophysical data (water systems), and human inputs (tweets posted on Twitter). In the approach, a high order Conditional Random Field (CRF) is constructed that enforces predictions based on IoT observations consistent with human inputs to improve the performance of event identifications. Considering the physical water network as a graph, a CRF model is built and learned by the Structured Support Vector Machine (SSVM) using node features such as water pressure and flow rate. After that, we built the high order CRF system by enforcing twitter leakage detection information. An optimal inference algorithm is proposed for the adapted high order CRF model. Experimental results show the effectiveness of our system.