 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask Space Tracking of Soft Manipulators: Inner-Outer Loop Control Based on Cosserat-Rod Models
Paper and Code
Oct 03, 2022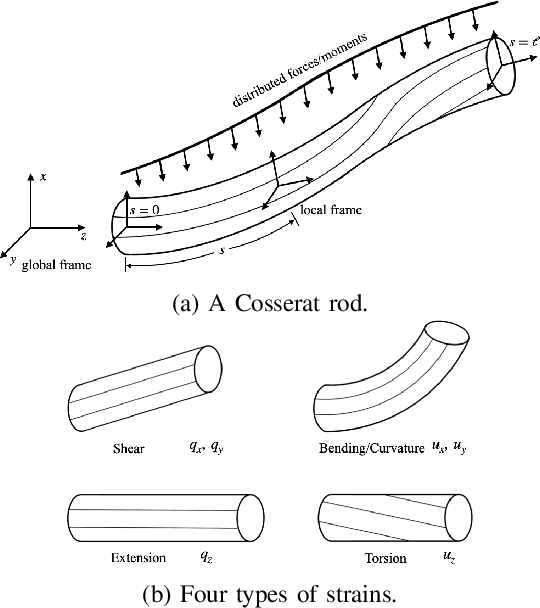

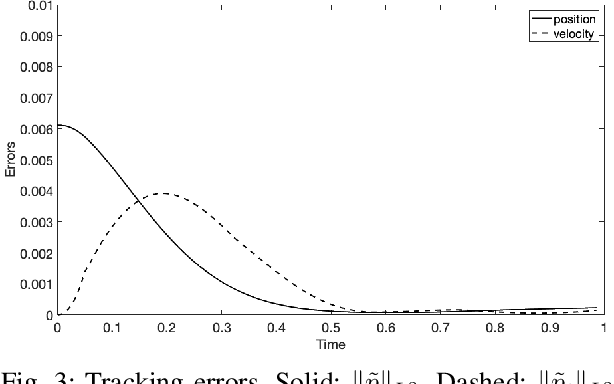
Soft robots are robotic systems made of deformable materials and exhibit unique flexibility that can be exploited for complex environments and tasks. However, their control problem has been considered a challenging subject because they are of infinite degrees of freedom and highly under-actuated. Existing studies have mainly relied on simplified and approximated finite-dimensional models. In this work, we exploit infinite-dimensional nonlinear control for soft robots. We adopt the Cosserat-rod theory and employ nonlinear partial differential equations (PDEs) to model the kinematics and dynamics of soft manipulators, including their translational motions (for shear and elongation) and rotational motions (for bending and torsion). The objective is to achieve position tracking of the whole manipulator in a planar task space by controlling the moments (generated by actuators). The control design is inspired by the energy decay property of damped wave equations and has an inner-outer loop structure. In the outer loop, we design desired rotational motions that rotate the translational component into a direction that asymptotically dissipates the energy associated with position tracking errors. In the inner loop, we design inputs for the rotational components to track their desired motions, again by dissipating the rotational energy. We prove that the closed-loop system is exponentially stable and evaluate its performance through simulations.