 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Attention Field: Emerging Point Relevance in 3D Scenes for One-Shot Dexterous Grasping
Oct 30, 2024



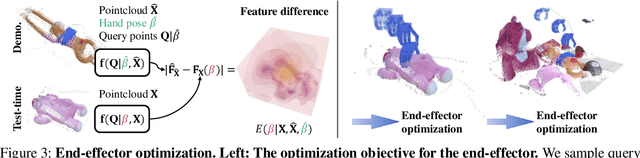
One-shot transfer of dexterous grasps to novel scenes with object and context variations has been a challenging problem. While distilled feature fields from large vision models have enabled semantic correspondences across 3D scenes, their features are point-based and restricted to object surfaces, limiting their capability of modeling complex semantic feature distributions for hand-object interactions. In this work, we propose the \textit{neural attention field} for representing semantic-aware dense feature fields in the 3D space by modeling inter-point relevance instead of individual point features. Core to it is a transformer decoder that computes the cross-attention between any 3D query point with all the scene points, and provides the query point feature with an attention-based aggregation. We further propose a self-supervised framework for training the transformer decoder from only a few 3D pointclouds without hand demonstrations. Post-training, the attention field can be applied to novel scenes for semantics-aware dexterous grasping from one-shot demonstration. Experiments show that our method provides better optimization landscapes by encouraging the end-effector to focus on task-relevant scene regions, resulting in significant improvements in success rates on real robots compared with the feature-field-based methods.
SparseDFF: Sparse-View Feature Distillation for One-Shot Dexterous Manipulation
Oct 25, 2023


Humans excel at transferring manipulation skills across diverse object shapes, poses, and appearances due to their understanding of semantic correspondences between different instances. To endow robots with a similar high-level understanding, we develop a Distilled Feature Field (DFF) for 3D scenes, leveraging large 2D vision models to distill semantic features from multiview images. While current research demonstrates advanced performance in reconstructing DFFs from dense views, the development of learning a DFF from sparse views is relatively nascent, despite its prevalence in numerous manipulation tasks with fixed cameras. In this work, we introduce SparseDFF, a novel method for acquiring view-consistent 3D DFFs from sparse RGBD observations, enabling one-shot learning of dexterous manipulations that are transferable to novel scenes. Specifically, we map the image features to the 3D point cloud, allowing for propagation across the 3D space to establish a dense feature field. At the core of SparseDFF is a lightweight feature refinement network, optimized with a contrastive loss between pairwise views after back-projecting the image features onto the 3D point cloud. Additionally, we implement a point-pruning mechanism to augment feature continuity within each local neighborhood. By establishing coherent feature fields on both source and target scenes, we devise an energy function that facilitates the minimization of feature discrepancies w.r.t. the end-effector parameters between the demonstration and the target manipulation. We evaluate our approach using a dexterous hand, mastering real-world manipulations on both rigid and deformable objects, and showcase robust generalization in the face of object and scene-context variations.
ImageManip: Image-based Robotic Manipulation with Affordance-guided Next View Selection
Oct 13, 2023



In the realm of future home-assistant robots, 3D articulated object manipulation is essential for enabling robots to interact with their environment. Many existing studies make use of 3D point clouds as the primary input for manipulation policies. However, this approach encounters challenges due to data sparsity and the significant cost associated with acquiring point cloud data, which can limit its practicality. In contrast, RGB images offer high-resolution observations using cost effective devices but lack spatial 3D geometric information. To overcome these limitations, we present a novel image-based robotic manipulation framework. This framework is designed to capture multiple perspectives of the target object and infer depth information to complement its geometry. Initially, the system employs an eye-on-hand RGB camera to capture an overall view of the target object. It predicts the initial depth map and a coarse affordance map. The affordance map indicates actionable areas on the object and serves as a constraint for selecting subsequent viewpoints. Based on the global visual prior, we adaptively identify the optimal next viewpoint for a detailed observation of the potential manipulation success area. We leverage geometric consistency to fuse the views, resulting in a refined depth map and a more precise affordance map for robot manipulation decisions. By comparing with prior works that adopt point clouds or RGB images as inputs, we demonstrate the effectiveness and practicality of our method. In the project webpage (https://sites.google.com/view/imagemanip), real world experiments further highlight the potential of our method for practical deployment.