 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGAPSLAM: Blending Gaussian Approximation and Particle Filters for Real-Time Non-Gaussian SLAM
Mar 24, 2023Inferring the posterior distribution in SLAM is critical for evaluating the uncertainty in localization and mapping, as well as supporting subsequent planning tasks aiming to reduce uncertainty for safe navigation. However, real-time full posterior inference techniques, such as Gaussian approximation and particle filters, either lack expressiveness for representing non-Gaussian posteriors or suffer from performance degeneracy when estimating high-dimensional posteriors. Inspired by the complementary strengths of Gaussian approximation and particle filters$\unicode{x2013}$scalability and non-Gaussian estimation, respectively$\unicode{x2013}$we blend these two approaches to infer marginal posteriors in SLAM. Specifically, Gaussian approximation provides robot pose distributions on which particle filters are conditioned to sample landmark marginals. In return, the maximum a posteriori point among these samples can be used to reset linearization points in the nonlinear optimization solver of the Gaussian approximation, facilitating the pursuit of global optima. We demonstrate the scalability, generalizability, and accuracy of our algorithm for real-time full posterior inference on realworld range-only SLAM and object-based bearing-only SLAM datasets.
Optimizing Fiducial Marker Placement for Improved Visual Localization
Nov 02, 2022Adding fiducial markers to a scene is a well-known strategy for making visual localization algorithms more robust. Traditionally, these marker locations are selected by humans who are familiar with visual localization techniques. This paper explores the problem of automatic marker placement within a scene. Specifically, given a predetermined set of markers and a scene model, we compute optimized marker positions within the scene that can improve accuracy in visual localization. Our main contribution is a novel framework for modeling camera localizability that incorporates both natural scene features and artificial fiducial markers added to the scene. We present optimized marker placement (OMP), a greedy algorithm that is based on the camera localizability framework. We have also designed a simulation framework for testing marker placement algorithms on 3D models and images generated from synthetic scenes. We have evaluated OMP within this testbed and demonstrate an improvement in the localization rate by up to 20 percent on three different scenes.
Online Incremental Non-Gaussian Inference for SLAM Using Normalizing Flows
Oct 02, 2021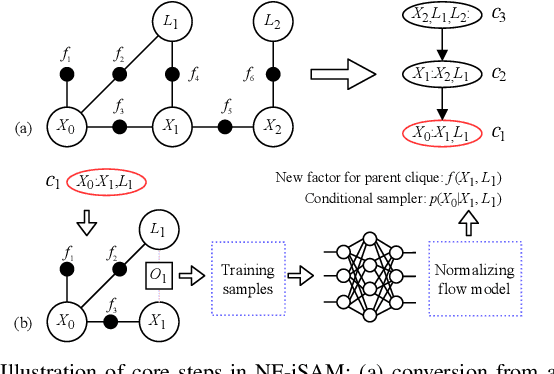
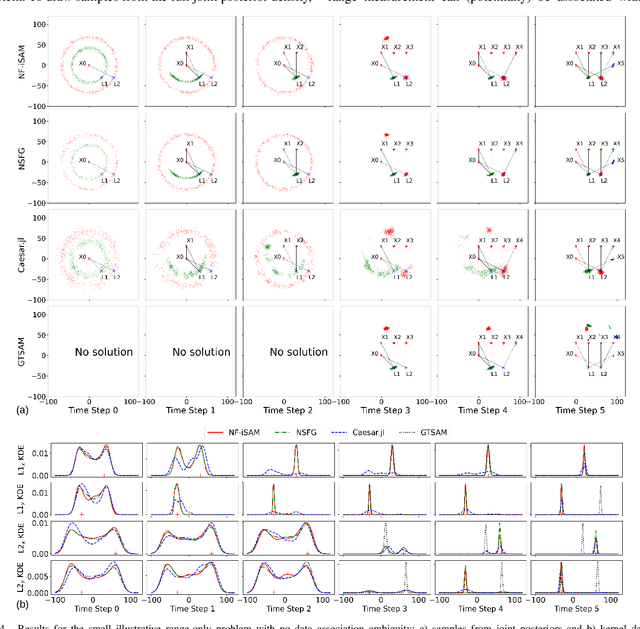
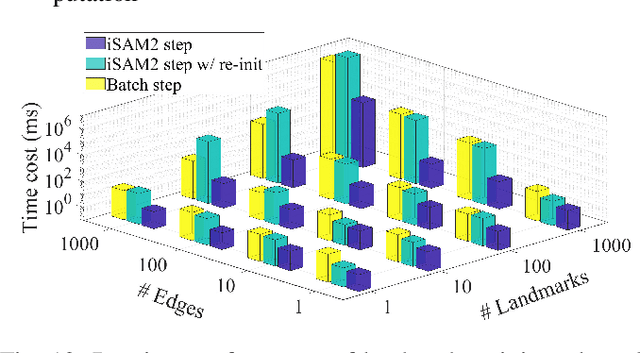
This paper presents a novel non-Gaussian inference algorithm, Normalizing Flow iSAM (NF-iSAM), for solving SLAM problems with non-Gaussian factors and/or nonlinear measurement models. NF-iSAM exploits the expressive power of neural networks to model normalizing flows that can accurately approximate the joint posterior of highly nonlinear and non-Gaussian factor graphs. By leveraging the Bayes tree, NF-iSAM is able to exploit the sparsity structure of SLAM, thus enabling efficient incremental updates similar to iSAM2, although in the more challenging non-Gaussian setting. We demonstrate the performance of NF-iSAM and compare it against state-of-the-art algorithms such as iSAM2 (Gaussian) and mm-iSAM (non-Gaussian) in synthetic and real range-only SLAM datasets with data association ambiguity.
On Reference Solutions to Non-Gaussian SLAM Factor Graphs
Sep 22, 2021
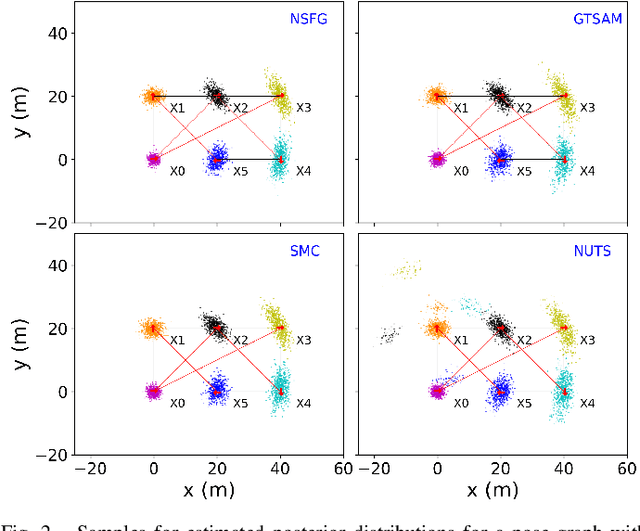
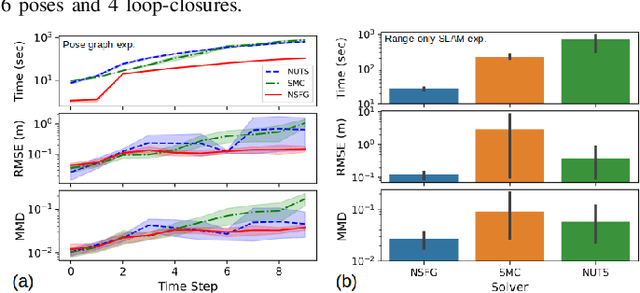

Many real-world applications of simultaneous localization and mapping (SLAM) require approximate inference approaches, as exact inference for high-dimensional non-Gaussian posterior distributions is often computationally intractable. There are substantial challenges, however, in evaluating the quality of a solution provided by such inference techniques. One approach to solution evaluation is to solve the non-Gaussian posteriors with a more computationally expensive but generally accurate approach to create a reference solution for side-by-side comparison. Our work takes this direction. This paper presents nested sampling for factor graphs (NSFG), a nested-sampling-based approach for posterior estimation in non-Gaussian factor graph inference. Although NSFG applies to any problem modeled as inference over a factor graph, we focus on providing reference solutions for evaluation of approximate inference approaches to SLAM problems. The sparsity structure of SLAM factor graphs is exploited for improved computational performance without sacrificing solution quality. We compare NSFG to two other sampling-based approaches, the No-U-Turn sampler (NUTS) and sequential Monte Carlo (SMC), as well as GTSAM, a state-of-the-art Gaussian SLAM solver. We evaluate across several synthetic examples of interest to the non-Gaussian SLAM community, including multi-robot range-only SLAM and range-only SLAM with ambiguous data associations. Quantitative and qualitative analyses show NSFG is capable of producing high-fidelity solutions to a wide range of non-Gaussian SLAM problems, with notably superior solutions than NUTS and SMC. In addition, NSFG demonstrated improved scalability over NUTS and SMC.
A Multi-Hypothesis Approach to Pose Ambiguity in Object-Based SLAM
Aug 03, 2021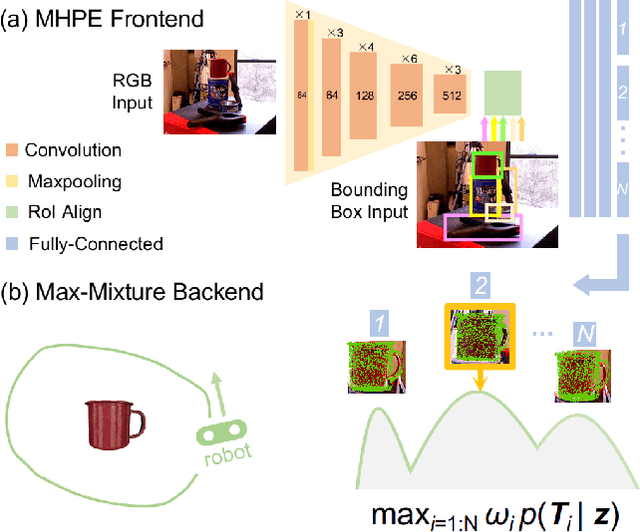
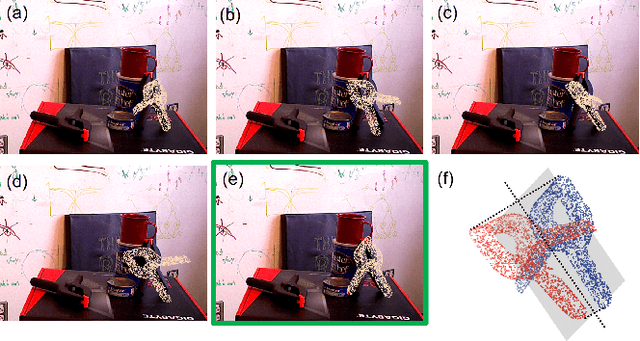
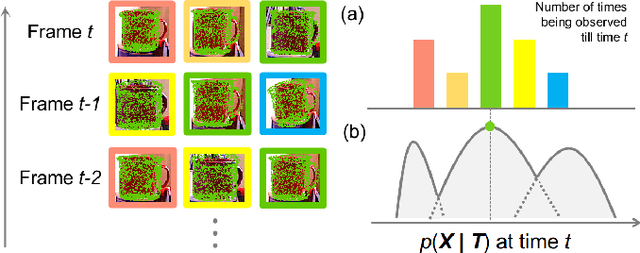
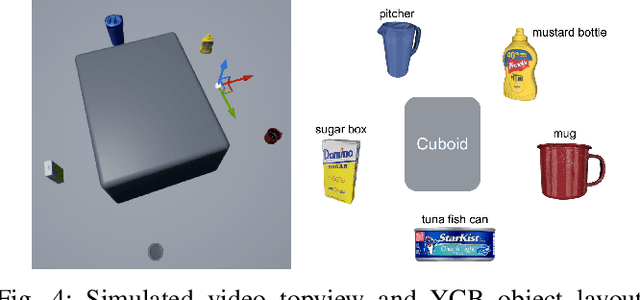
In object-based Simultaneous Localization and Mapping (SLAM), 6D object poses offer a compact representation of landmark geometry useful for downstream planning and manipulation tasks. However, measurement ambiguity then arises as objects may possess complete or partial object shape symmetries (e.g., due to occlusion), making it difficult or impossible to generate a single consistent object pose estimate. One idea is to generate multiple pose candidates to counteract measurement ambiguity. In this paper, we develop a novel approach that enables an object-based SLAM system to reason about multiple pose hypotheses for an object, and synthesize this locally ambiguous information into a globally consistent robot and landmark pose estimation formulation. In particular, we (1) present a learned pose estimation network that provides multiple hypotheses about the 6D pose of an object; (2) by treating the output of our network as components of a mixture model, we incorporate pose predictions into a SLAM system, which, over successive observations, recovers a globally consistent set of robot and object (landmark) pose estimates. We evaluate our approach on the popular YCB-Video Dataset and a simulated video featuring YCB objects. Experiments demonstrate that our approach is effective in improving the robustness of object-based SLAM in the face of object pose ambiguity.
Consensus-Informed Optimization Over Mixtures for Ambiguity-Aware Object SLAM
Jul 20, 2021


Objects could often have multiple probable poses in single-shot measurements due to symmetry, occlusion or perceptual failures. A robust object-level simultaneous localization and mapping (object SLAM) algorithm needs to be aware of the pose ambiguity. We propose to maintain and subsequently dis-ambiguate the multiple pose interpretations to gradually recover a globally consistent world representation. The max-mixtures model is applied to implicitly and efficiently track all pose hypotheses. The temporally consistent hypotheses are extracted to guide the optimization solution into the global optimum. This consensus-informed inference method is implemented on top of the incremental SLAM framework iSAM2, via landmark variable re-initialization.
NF-iSAM: Incremental Smoothing and Mapping via Normalizing Flows
May 11, 2021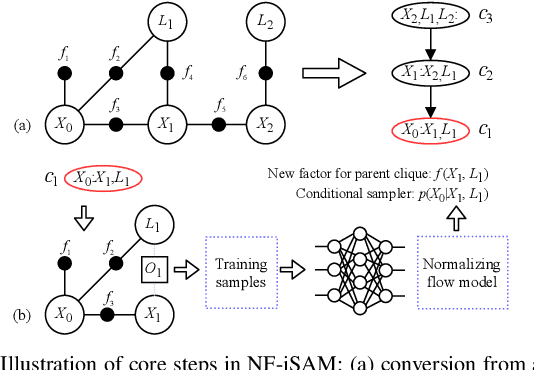
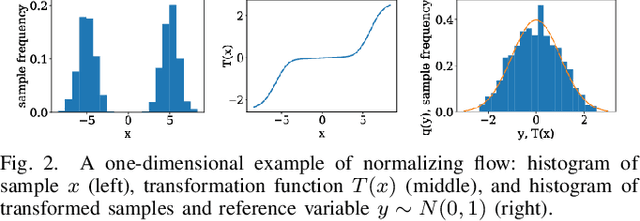
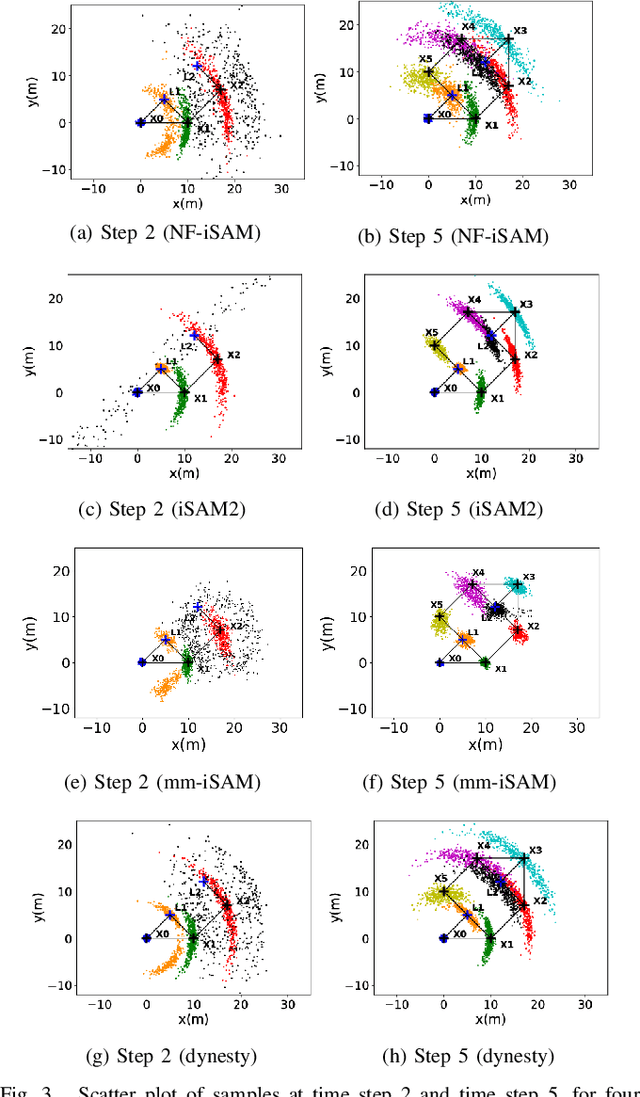
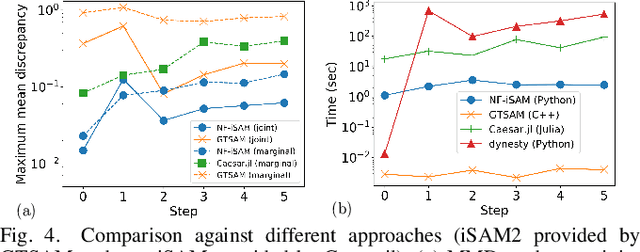
This paper presents a novel non-Gaussian inference algorithm, Normalizing Flow iSAM (NF-iSAM), for solving SLAM problems with non-Gaussian factors and/or non-linear measurement models. NF-iSAM exploits the expressive power of neural networks, and trains normalizing flows to draw samples from the joint posterior of non-Gaussian factor graphs. By leveraging the Bayes tree, NF-iSAM is able to exploit the sparsity structure of SLAM, thus enabling efficient incremental updates similar to iSAM2, albeit in the more challenging non-Gaussian setting. We demonstrate the performance of NF-iSAM and compare it against the state-of-the-art algorithms such as iSAM2 (Gaussian) and mm-iSAM (non-Gaussian) in synthetic and real range-only SLAM datasets.