 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLaVA-FA: Learning Fourier Approximation for Compressing Large Multimodal Models
Jan 28, 2026Large multimodal models (LMMs) have achieved impressive performance on various vision-language tasks, but their substantial computational and memory costs hinder their practical deployment. Existing compression methods often decouple low-rank decomposition and quantization, leading to compounded reconstruction errors, especially in multimodal architectures with cross-modal redundancy. To address this issue, we propose LLaVA-FA, a novel efficient LMM that performs joint low-rank plus quantization approximation in the frequency domain. By leveraging the de-correlation and conjugate symmetry properties of Fourier transform, LLaVA-FA achieves more compact and accurate weight representations. Furthermore, we introduce PolarQuant, a polar-coordinate quantization method tailored for complex matrices, and an optional diagonal calibration (ODC) scheme that eliminates the need for large-scale calibration data. Extensive experimental results demonstrate that our proposed LLaVA-FA outperforms existing efficient multimodal models across multiple benchmarks while maintaining minimal activated parameters and low computational costs, validating its effectiveness as a powerful solution for compressing LMMs.
GRASP: Guided Region-Aware Sparse Prompting for Adapting MLLMs to Remote Sensing
Jan 23, 2026In recent years, Multimodal Large Language Models (MLLMs) have made significant progress in visual question answering tasks. However, directly applying existing fine-tuning methods to remote sensing (RS) images often leads to issues such as overfitting on background noise or neglecting target details. This is primarily due to the large-scale variations, sparse target distributions, and complex regional semantic features inherent in RS images. These challenges limit the effectiveness of MLLMs in RS tasks. To address these challenges, we propose a parameter-efficient fine-tuning (PEFT) strategy called Guided Region-Aware Sparse Prompting (GRASP). GRASP introduces spatially structured soft prompts associated with spatial blocks extracted from a frozen visual token grid. Through a question-guided sparse fusion mechanism, GRASP dynamically aggregates task-specific context into a compact global prompt, enabling the model to focus on relevant regions while filtering out background noise. Extensive experiments on multiple RSVQA benchmarks show that GRASP achieves competitive performance compared to existing fine-tuning and prompt-based methods while maintaining high parameter efficiency.
Efficient Medical Image Restoration via Reliability Guided Learning in Frequency Domain
Apr 15, 2025



Medical image restoration tasks aim to recover high-quality images from degraded observations, exhibiting emergent desires in many clinical scenarios, such as low-dose CT image denoising, MRI super-resolution, and MRI artifact removal. Despite the success achieved by existing deep learning-based restoration methods with sophisticated modules, they struggle with rendering computationally-efficient reconstruction results. Moreover, they usually ignore the reliability of the restoration results, which is much more urgent in medical systems. To alleviate these issues, we present LRformer, a Lightweight Transformer-based method via Reliability-guided learning in the frequency domain. Specifically, inspired by the uncertainty quantification in Bayesian neural networks (BNNs), we develop a Reliable Lesion-Semantic Prior Producer (RLPP). RLPP leverages Monte Carlo (MC) estimators with stochastic sampling operations to generate sufficiently-reliable priors by performing multiple inferences on the foundational medical image segmentation model, MedSAM. Additionally, instead of directly incorporating the priors in the spatial domain, we decompose the cross-attention (CA) mechanism into real symmetric and imaginary anti-symmetric parts via fast Fourier transform (FFT), resulting in the design of the Guided Frequency Cross-Attention (GFCA) solver. By leveraging the conjugated symmetric property of FFT, GFCA reduces the computational complexity of naive CA by nearly half. Extensive experimental results in various tasks demonstrate the superiority of the proposed LRformer in both effectiveness and efficiency.
Jointly RS Image Deblurring and Super-Resolution with Adjustable-Kernel and Multi-Domain Attention
Dec 07, 2024Remote Sensing (RS) image deblurring and Super-Resolution (SR) are common tasks in computer vision that aim at restoring RS image detail and spatial scale, respectively. However, real-world RS images often suffer from a complex combination of global low-resolution (LR) degeneration and local blurring degeneration. Although carefully designed deblurring and SR models perform well on these two tasks individually, a unified model that performs jointly RS image deblurring and super-resolution (JRSIDSR) task is still challenging due to the vital dilemma of reconstructing the global and local degeneration simultaneously. Additionally, existing methods struggle to capture the interrelationship between deblurring and SR processes, leading to suboptimal results. To tackle these issues, we give a unified theoretical analysis of RS images' spatial and blur degeneration processes and propose a dual-branch parallel network named AKMD-Net for the JRSIDSR task. AKMD-Net consists of two main branches: deblurring and super-resolution branches. In the deblurring branch, we design a pixel-adjustable kernel block (PAKB) to estimate the local and spatial-varying blur kernels. In the SR branch, a multi-domain attention block (MDAB) is proposed to capture the global contextual information enhanced with high-frequency details. Furthermore, we develop an adaptive feature fusion (AFF) module to model the contextual relationships between the deblurring and SR branches. Finally, we design an adaptive Wiener loss (AW Loss) to depress the prior noise in the reconstructed images. Extensive experiments demonstrate that the proposed AKMD-Net achieves state-of-the-art (SOTA) quantitative and qualitative performance on commonly used RS image datasets. The source code is publicly available at https://github.com/zpc456/AKMD-Net.
Analysis on Multi-robot Relative 6-DOF Pose Estimation Error Based on UWB Range
Sep 27, 2023



Relative pose estimation is the foundational requirement for multi-robot system, while it is a challenging research topic in infrastructure-free scenes. In this study, we analyze the relative 6-DOF pose estimation error of multi-robot system in GNSS-denied and anchor-free environment. An analytical lower bound of position and orientation estimation error is given under the assumption that distance between the nodes are far more than the size of robotic platform. Through simulation, impact of distance between nodes, altitudes and circumradius of tag simplex on pose estimation accuracy is discussed, which verifies the analysis results. Our analysis is expected to determine parameters (e.g. deployment of tags) of UWB based multi-robot systems.
Monolithic Integrated Multiband Acoustic Devices on Heterogeneous Substrate for Sub-6 GHz RF-FEMs
Oct 20, 2021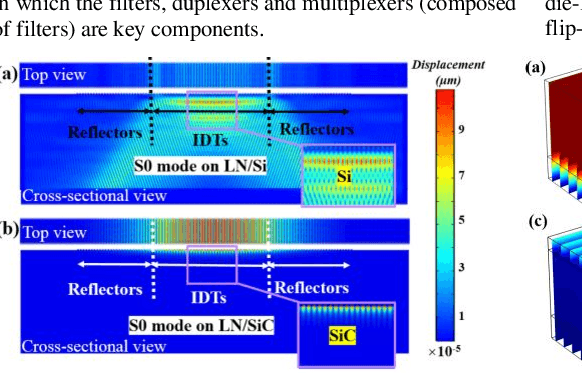
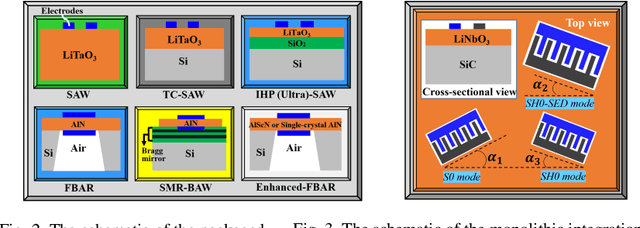
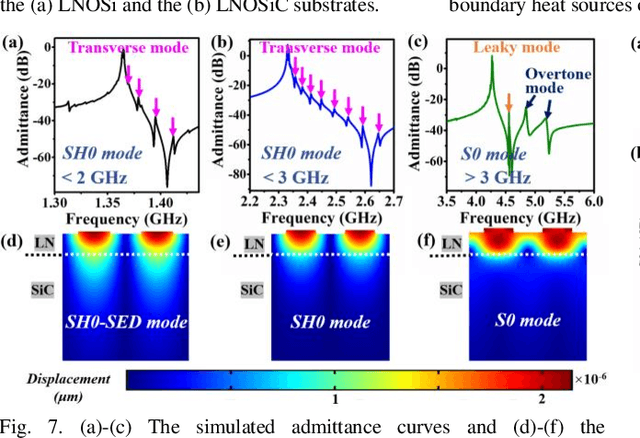
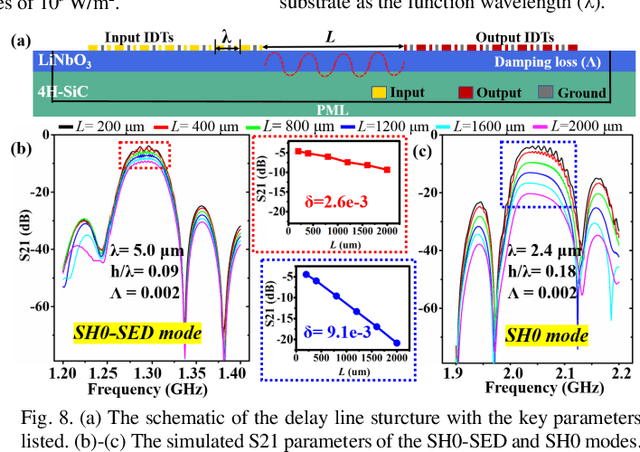
Monolithic integration of multiband (1.4~ 6.0 GHz) RF acoustic devices were successfully demonstrated within the same process flow by using the lithium niobate (LN) thin film on silicon carbide (LNOSiC) substrate. A novel surface mode with sinking energy distribution was proposed, exhibiting reduced propagation loss. Surface wave and Lamb wave resonators with suppressed transverse modes and leaky modes were demonstrated, showing scalable resonances from 1.4 to 5.7 GHz, electromechanical coupling coefficients (k2) between 7.9% and 29.3%, and maximum Bode-Q (Qmax) larger than 3200. Arrayed filters with a small footprint (4.0 x 2.5 mm2) but diverse center frequencies (fc) and 3-dB fractional bandwidths (FBW) were achieved, showing fc from 1.4 to 6.0 GHz, FBW between 3.3% and 13.3%, and insertion loss (IL) between 0.59 and 2.10 dB. These results may promote the progress of hundred-filter sub-6 GHz RF front-end modules (RF-FEMs).