 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOEVO: Co-Evolutionary Framework for Joint Functional Correctness and PPA Optimization in LLM-Based RTL Generation
Apr 16, 2026LLM-based RTL code generation methods increasingly target both functional correctness and PPA quality, yet existing approaches universally decouple the two objectives, optimizing PPA only after correctness is fully achieved. Whether through sequential multi-agent pipelines, evolutionary search with binary correctness gates, or hierarchical reward dependencies, partially correct but architecturally promising candidates are systematically discarded. Moreover, existing methods reduce the multi-objective PPA space to a single scalar fitness, obscuring the trade-offs among area, delay, and power. To address these limitations, we propose COEVO, a co-evolutionary framework that unifies correctness and PPA optimization within a single evolutionary loop. COEVO formulates correctness as a continuous co-optimization dimension alongside area, delay, and power, enabled by an enhanced testbench that provides fine-grained scoring and detailed diagnostic feedback. An adaptive correctness gate with annealing allows PPA-promising but partially correct candidates to guide the search toward jointly optimal solutions. To preserve the full PPA trade-off structure, COEVO employs four-dimensional Pareto-based non-dominated sorting with configurable intra-level sorting, replacing scalar fitness without manual weight tuning. Evaluated on VerilogEval 2.0 and RTLLM 2.0, COEVO achieves 97.5\% and 94.5\% Pass@1 with GPT-5.4-mini, surpassing all agentic baselines across four LLM backbones, while attaining the best PPA on 43 out of 49 synthesizable RTLLM designs.
Auditing Multi-Agent LLM Reasoning Trees Outperforms Majority Vote and LLM-as-Judge
Feb 10, 2026Multi-agent systems (MAS) can substantially extend the reasoning capacity of large language models (LLMs), yet most frameworks still aggregate agent outputs with majority voting. This heuristic discards the evidential structure of reasoning traces and is brittle under the confabulation consensus, where agents share correlated biases and converge on the same incorrect rationale. We introduce AgentAuditor, which replaces voting with a path search over a Reasoning Tree that explicitly represents agreements and divergences among agent traces. AgentAuditor resolves conflicts by comparing reasoning branches at critical divergence points, turning global adjudication into efficient, localized verification. We further propose Anti-Consensus Preference Optimization (ACPO), which trains the adjudicator on majority-failure cases and rewards evidence-based minority selections over popular errors. AgentAuditor is agnostic to MAS setting, and we find across 5 popular settings that it yields up to 5% absolute accuracy improvement over a majority vote, and up to 3% over using LLM-as-Judge.
VeriMoA: A Mixture-of-Agents Framework for Spec-to-HDL Generation
Oct 31, 2025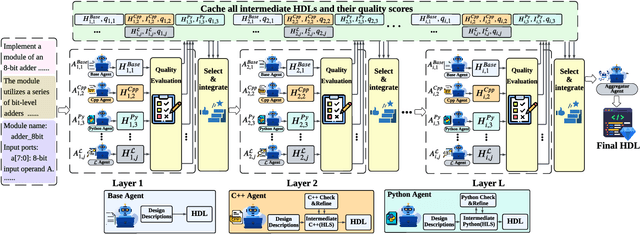
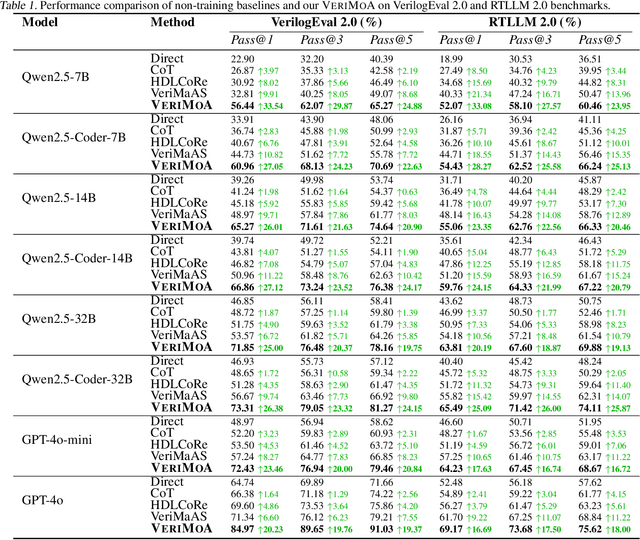
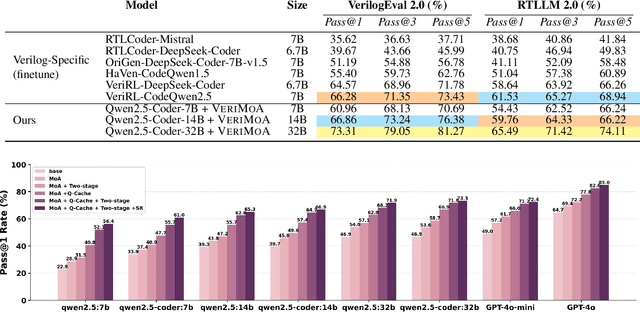
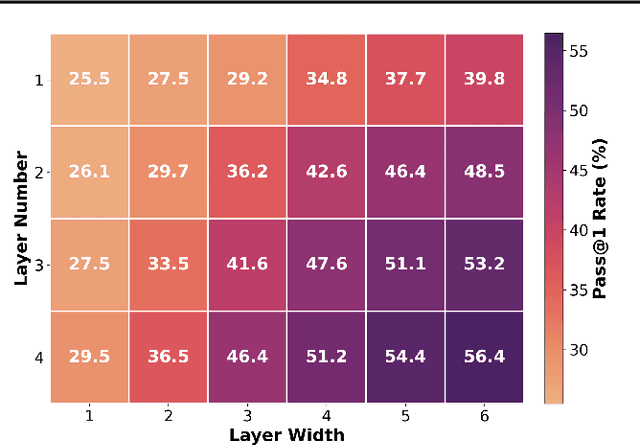
Automation of Register Transfer Level (RTL) design can help developers meet increasing computational demands. Large Language Models (LLMs) show promise for Hardware Description Language (HDL) generation, but face challenges due to limited parametric knowledge and domain-specific constraints. While prompt engineering and fine-tuning have limitations in knowledge coverage and training costs, multi-agent architectures offer a training-free paradigm to enhance reasoning through collaborative generation. However, current multi-agent approaches suffer from two critical deficiencies: susceptibility to noise propagation and constrained reasoning space exploration. We propose VeriMoA, a training-free mixture-of-agents (MoA) framework with two synergistic innovations. First, a quality-guided caching mechanism to maintain all intermediate HDL outputs and enables quality-based ranking and selection across the entire generation process, encouraging knowledge accumulation over layers of reasoning. Second, a multi-path generation strategy that leverages C++ and Python as intermediate representations, decomposing specification-to-HDL translation into two-stage processes that exploit LLM fluency in high-resource languages while promoting solution diversity. Comprehensive experiments on VerilogEval 2.0 and RTLLM 2.0 benchmarks demonstrate that VeriMoA achieves 15--30% improvements in Pass@1 across diverse LLM backbones, especially enabling smaller models to match larger models and fine-tuned alternatives without requiring costly training.
H$^2$GFM: Towards unifying Homogeneity and Heterogeneity on Text-Attributed Graphs
Jun 10, 2025The growing interests and applications of graph learning in diverse domains have propelled the development of a unified model generalizing well across different graphs and tasks, known as the Graph Foundation Model (GFM). Existing research has leveraged text-attributed graphs (TAGs) to tackle the heterogeneity in node features among graphs. However, they primarily focus on homogeneous TAGs (HoTAGs), leaving heterogeneous TAGs (HeTAGs), where multiple types of nodes/edges reside, underexplored. To enhance the capabilities and applications of GFM, we introduce H$^2$GFM, a novel framework designed to generalize across both HoTAGs and HeTAGs. Our model projects diverse meta-relations among graphs under a unified textual space, and employs a context encoding to capture spatial and higher-order semantic relationships. To achieve robust node representations, we propose a novel context-adaptive graph transformer (CGT), effectively capturing information from both context neighbors and their relationships. Furthermore, we employ a mixture of CGT experts to capture the heterogeneity in structural patterns among graph types. Comprehensive experiments on a wide range of HoTAGs and HeTAGs as well as learning scenarios demonstrate the effectiveness of our model.
HDLCoRe: A Training-Free Framework for Mitigating Hallucinations in LLM-Generated HDL
Mar 18, 2025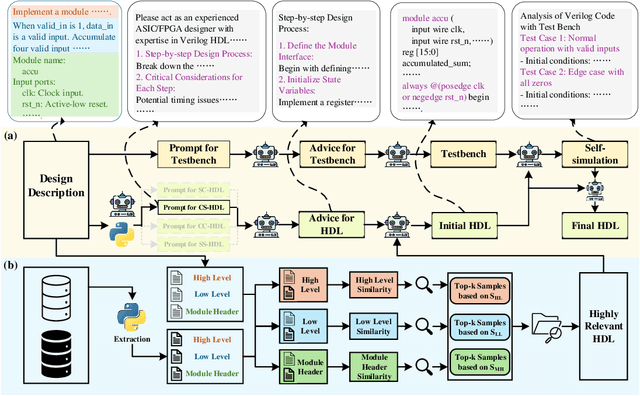



Recent advances in large language models (LLMs) have demonstrated remarkable capabilities in code generation tasks. However, when applied to hardware description languages (HDL), these models exhibit significant limitations due to data scarcity, resulting in hallucinations and incorrect code generation. To address these challenges, we propose HDLCoRe, a training-free framework that enhances LLMs' HDL generation capabilities through prompt engineering techniques and retrieval-augmented generation (RAG). Our approach consists of two main components: (1) an HDL-aware Chain-of-Thought (CoT) prompting technique with self-verification that classifies tasks by complexity and type, incorporates domain-specific knowledge, and guides LLMs through step-by-step self-simulation for error correction; and (2) a two-stage heterogeneous RAG system that addresses formatting inconsistencies through key component extraction and efficiently retrieves relevant HDL examples through sequential filtering and re-ranking. HDLCoRe eliminates the need for model fine-tuning while substantially improving LLMs' HDL generation capabilities. Experimental results demonstrate that our framework achieves superior performance on the RTLLM2.0 benchmark, significantly reducing hallucinations and improving both syntactic and functional correctness.
End-to-End Learning Framework for Solving Non-Markovian Optimal Control
Feb 07, 2025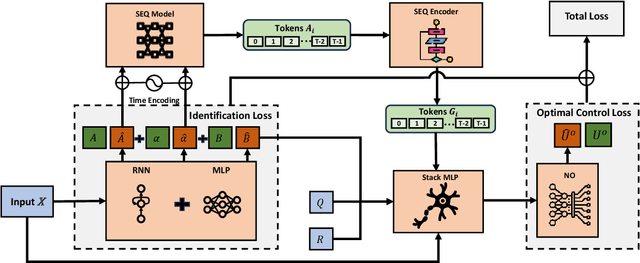
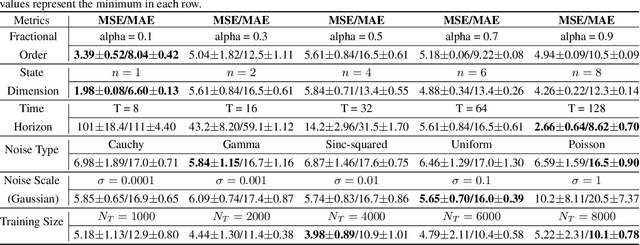
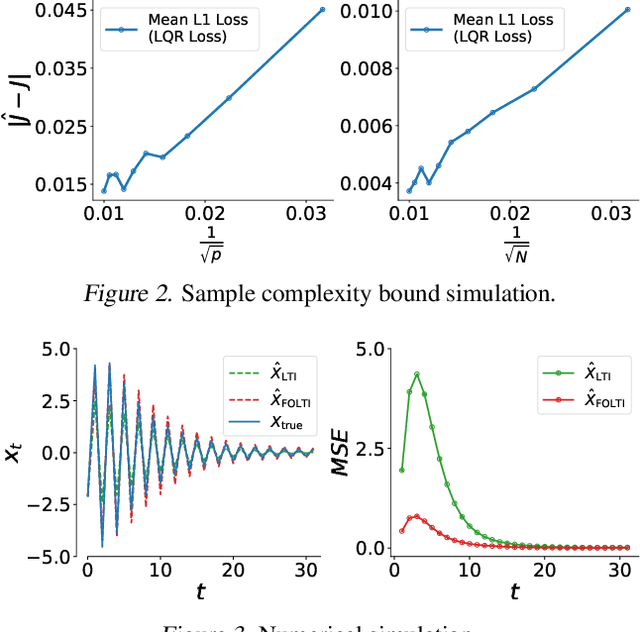
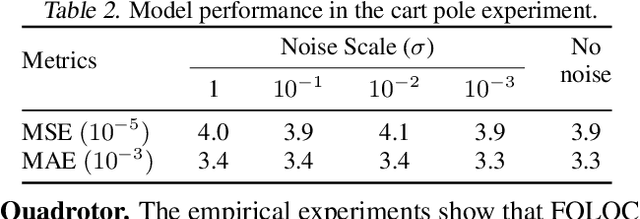
Integer-order calculus often falls short in capturing the long-range dependencies and memory effects found in many real-world processes. Fractional calculus addresses these gaps via fractional-order integrals and derivatives, but fractional-order dynamical systems pose substantial challenges in system identification and optimal control due to the lack of standard control methodologies. In this paper, we theoretically derive the optimal control via \textit{linear quadratic regulator} (LQR) for \textit{fractional-order linear time-invariant }(FOLTI) systems and develop an end-to-end deep learning framework based on this theoretical foundation. Our approach establishes a rigorous mathematical model, derives analytical solutions, and incorporates deep learning to achieve data-driven optimal control of FOLTI systems. Our key contributions include: (i) proposing an innovative system identification method control strategy for FOLTI systems, (ii) developing the first end-to-end data-driven learning framework, \textbf{F}ractional-\textbf{O}rder \textbf{L}earning for \textbf{O}ptimal \textbf{C}ontrol (FOLOC), that learns control policies from observed trajectories, and (iii) deriving a theoretical analysis of sample complexity to quantify the number of samples required for accurate optimal control in complex real-world problems. Experimental results indicate that our method accurately approximates fractional-order system behaviors without relying on Gaussian noise assumptions, pointing to promising avenues for advanced optimal control.
A structure-aware framework for learning device placements on computation graphs
May 23, 2024



Existing approaches for device placement ignore the topological features of computation graphs and rely mostly on heuristic methods for graph partitioning. At the same time, they either follow a grouper-placer or an encoder-placer architecture, which requires understanding the interaction structure between code operations. To bridge the gap between encoder-placer and grouper-placer techniques, we propose a novel framework for the task of device placement, relying on smaller computation graphs extracted from the OpenVINO toolkit using reinforcement learning. The framework consists of five steps, including graph coarsening, node representation learning and policy optimization. It facilitates end-to-end training and takes into consideration the directed and acyclic nature of the computation graphs. We also propose a model variant, inspired by graph parsing networks and complex network analysis, enabling graph representation learning and personalized graph partitioning jointly, using an unspecified number of groups. To train the entire framework, we utilize reinforcement learning techniques by employing the execution time of the suggested device placements to formulate the reward. We demonstrate the flexibility and effectiveness of our approach through multiple experiments with three benchmark models, namely Inception-V3, ResNet, and BERT. The robustness of the proposed framework is also highlighted through an ablation study. The suggested placements improve the inference speed for the benchmark models by up to $58.2\%$ over CPU execution and by up to $60.24\%$ compared to other commonly used baselines.