 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA structure-aware framework for learning device placements on computation graphs
May 23, 2024



Existing approaches for device placement ignore the topological features of computation graphs and rely mostly on heuristic methods for graph partitioning. At the same time, they either follow a grouper-placer or an encoder-placer architecture, which requires understanding the interaction structure between code operations. To bridge the gap between encoder-placer and grouper-placer techniques, we propose a novel framework for the task of device placement, relying on smaller computation graphs extracted from the OpenVINO toolkit using reinforcement learning. The framework consists of five steps, including graph coarsening, node representation learning and policy optimization. It facilitates end-to-end training and takes into consideration the directed and acyclic nature of the computation graphs. We also propose a model variant, inspired by graph parsing networks and complex network analysis, enabling graph representation learning and personalized graph partitioning jointly, using an unspecified number of groups. To train the entire framework, we utilize reinforcement learning techniques by employing the execution time of the suggested device placements to formulate the reward. We demonstrate the flexibility and effectiveness of our approach through multiple experiments with three benchmark models, namely Inception-V3, ResNet, and BERT. The robustness of the proposed framework is also highlighted through an ablation study. The suggested placements improve the inference speed for the benchmark models by up to $58.2\%$ over CPU execution and by up to $60.24\%$ compared to other commonly used baselines.
Learning Hyperbolic Representations of Topological Features
Mar 16, 2021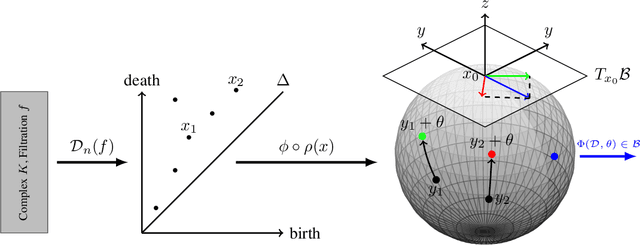
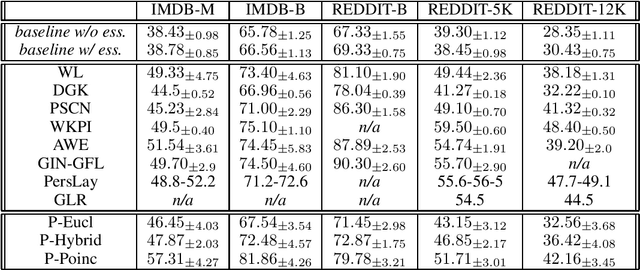
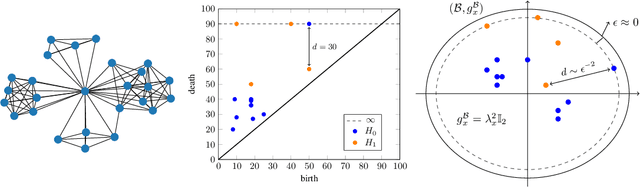
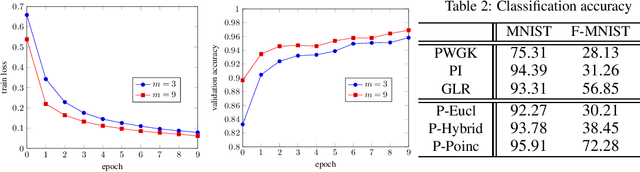
Learning task-specific representations of persistence diagrams is an important problem in topological data analysis and machine learning. However, current state of the art methods are restricted in terms of their expressivity as they are focused on Euclidean representations. Persistence diagrams often contain features of infinite persistence (i.e., essential features) and Euclidean spaces shrink their importance relative to non-essential features because they cannot assign infinite distance to finite points. To deal with this issue, we propose a method to learn representations of persistence diagrams on hyperbolic spaces, more specifically on the Poincare ball. By representing features of infinite persistence infinitesimally close to the boundary of the ball, their distance to non-essential features approaches infinity, thereby their relative importance is preserved. This is achieved without utilizing extremely high values for the learnable parameters, thus the representation can be fed into downstream optimization methods and trained efficiently in an end-to-end fashion. We present experimental results on graph and image classification tasks and show that the performance of our method is on par with or exceeds the performance of other state of the art methods.