 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Aware Risk Estimation of Perception Failures for Autonomous Vehicles
May 03, 2023



Safety and performance are key enablers for autonomous driving: on the one hand we want our autonomous vehicles (AVs) to be safe, while at the same time their performance (e.g., comfort or progression) is key to adoption. To effectively walk the tight-rope between safety and performance, AVs need to be risk-averse, but not entirely risk-avoidant. To facilitate safe-yet-performant driving, in this paper, we develop a task-aware risk estimator that assesses the risk a perception failure poses to the AV's motion plan. If the failure has no bearing on the safety of the AV's motion plan, then regardless of how egregious the perception failure is, our task-aware risk estimator considers the failure to have a low risk; on the other hand, if a seemingly benign perception failure severely impacts the motion plan, then our estimator considers it to have a high risk. In this paper, we propose a task-aware risk estimator to decide whether a safety maneuver needs to be triggered. To estimate the task-aware risk, first, we leverage the perception failure - detected by a perception monitor - to synthesize an alternative plausible model for the vehicle's surroundings. The risk due to the perception failure is then formalized as the "relative" risk to the AV's motion plan between the perceived and the alternative plausible scenario. We employ a statistical tool called copula, which models tail dependencies between distributions, to estimate this risk. The theoretical properties of the copula allow us to compute probably approximately correct (PAC) estimates of the risk. We evaluate our task-aware risk estimator using NuPlan and compare it with established baselines, showing that the proposed risk estimator achieves the best F1-score (doubling the score of the best baseline) and exhibits a good balance between recall and precision, i.e., a good balance of safety and performance.
Visual Navigation for Autonomous Vehicles: An Open-source Hands-on Robotics Course at MIT
Jun 01, 2022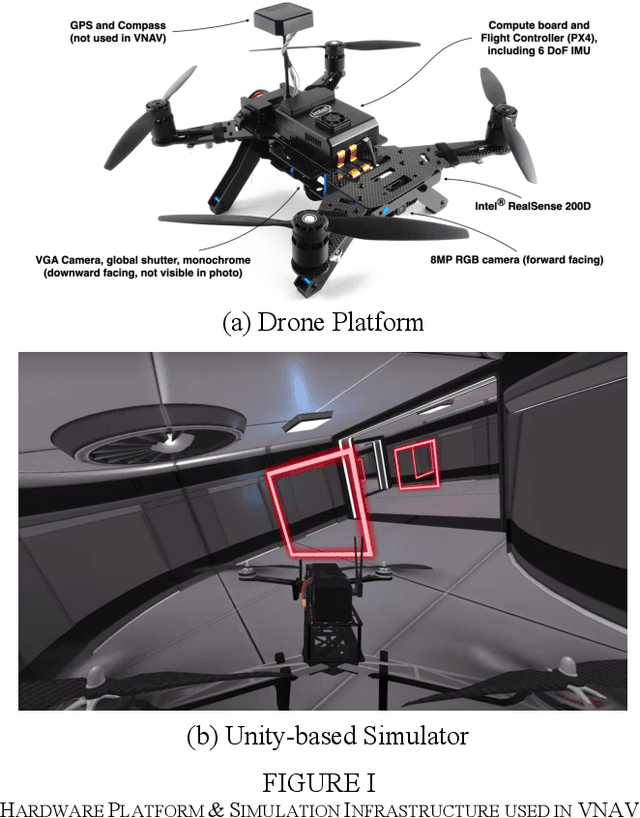
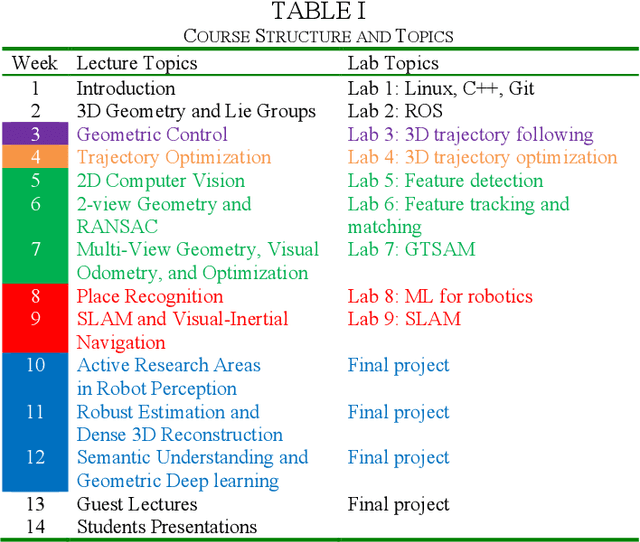
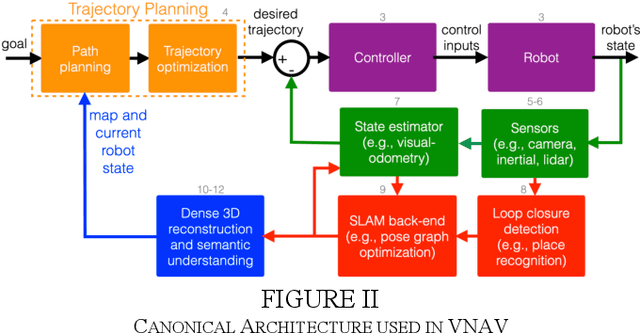
This paper reports on the development, execution, and open-sourcing of a new robotics course at MIT. The course is a modern take on "Visual Navigation for Autonomous Vehicles" (VNAV) and targets first-year graduate students and senior undergraduates with prior exposure to robotics. VNAV has the goal of preparing the students to perform research in robotics and vision-based navigation, with emphasis on drones and self-driving cars. The course spans the entire autonomous navigation pipeline; as such, it covers a broad set of topics, including geometric control and trajectory optimization, 2D and 3D computer vision, visual and visual-inertial odometry, place recognition, simultaneous localization and mapping, and geometric deep learning for perception. VNAV has three key features. First, it bridges traditional computer vision and robotics courses by exposing the challenges that are specific to embodied intelligence, e.g., limited computation and need for just-in-time and robust perception to close the loop over control and decision making. Second, it strikes a balance between depth and breadth by combining rigorous technical notes (including topics that are less explored in typical robotics courses, e.g., on-manifold optimization) with slides and videos showcasing the latest research results. Third, it provides a compelling approach to hands-on robotics education by leveraging a physical drone platform (mostly suitable for small residential courses) and a photo-realistic Unity-based simulator (open-source and scalable to large online courses). VNAV has been offered at MIT in the Falls of 2018-2021 and is now publicly available on MIT OpenCourseWare (OCW).
Monitoring of Perception Systems: Deterministic, Probabilistic, and Learning-based Fault Detection and Identification
May 22, 2022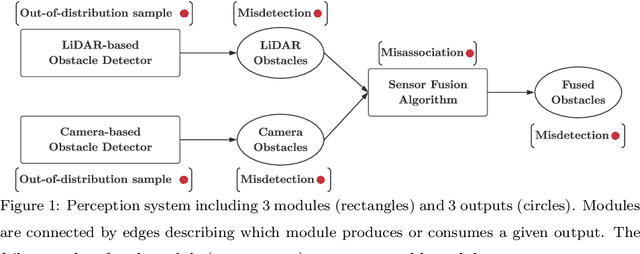


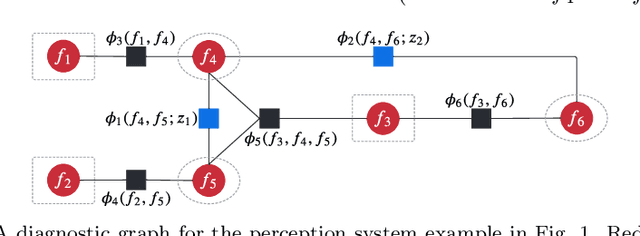
This paper investigates runtime monitoring of perception systems. Perception is a critical component of high-integrity applications of robotics and autonomous systems, such as self-driving cars. In these applications, failure of perception systems may put human life at risk, and a broad adoption of these technologies requires the development of methodologies to guarantee and monitor safe operation. Despite the paramount importance of perception, currently there is no formal approach for system-level perception monitoring. In this paper, we formalize the problem of runtime fault detection and identification in perception systems and present a framework to model diagnostic information using a diagnostic graph. We then provide a set of deterministic, probabilistic, and learning-based algorithms that use diagnostic graphs to perform fault detection and identification. Moreover, we investigate fundamental limits and provide deterministic and probabilistic guarantees on the fault detection and identification results. We conclude the paper with an extensive experimental evaluation, which recreates several realistic failure modes in the LGSVL open-source autonomous driving simulator, and applies the proposed system monitors to a state-of-the-art autonomous driving software stack (Baidu's Apollo Auto). The results show that the proposed system monitors outperform baselines, have the potential of preventing accidents in realistic autonomous driving scenarios, and incur a negligible computational overhead.
Monitoring and Diagnosability of Perception Systems
Nov 19, 2020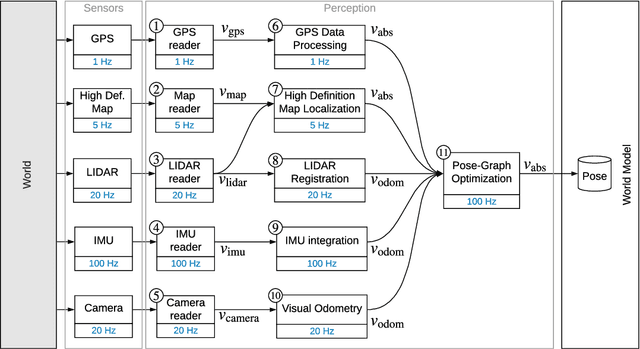
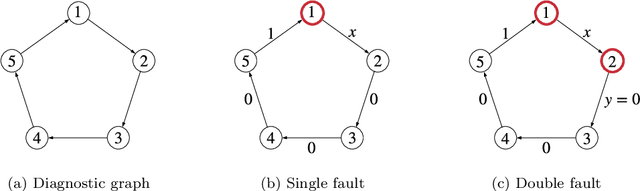
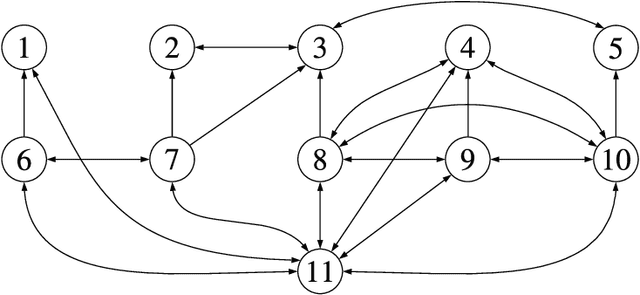
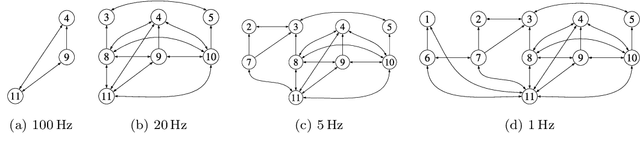
Perception is a critical component of high-integrity applications of robotics and autonomous systems, such as self-driving vehicles. In these applications, failure of perception systems may put human life at risk, and a broad adoption of these technologies requires the development of methodologies to guarantee and monitor safe operation. Despite the paramount importance of perception systems, currently there is no formal approach for system-level monitoring. In this work, we propose a mathematical model for runtime monitoring and fault detection and identification in perception systems. Towards this goal, we draw connections with the literature on diagnosability in multiprocessor systems, and generalize it to account for modules with heterogeneous outputs that interact over time. The resulting temporal diagnostic graphs (i) provide a framework to reason over the consistency of perception outputs -- across modules and over time -- thus enabling fault detection, (ii) allow us to establish formal guarantees on the maximum number of faults that can be uniquely identified in a given perception system, and (iii) enable the design of efficient algorithms for fault identification. We demonstrate our monitoring system, dubbed PerSyS, in realistic simulations using the LGSVL self-driving simulator and the Apollo Auto autonomy software stack, and show that PerSyS is able to detect failures in challenging scenarios (including scenarios that have caused self-driving car accidents in recent years), and is able to correctly identify faults while entailing a minimal computation overhead (< 5ms on a single-core CPU).
Outlier-Robust Estimation: Hardness, Minimally-Tuned Algorithms, and Applications
Jul 29, 2020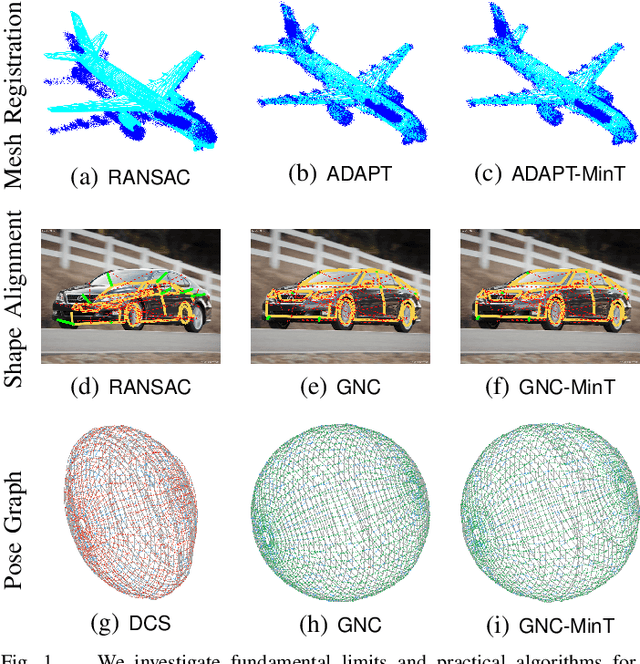
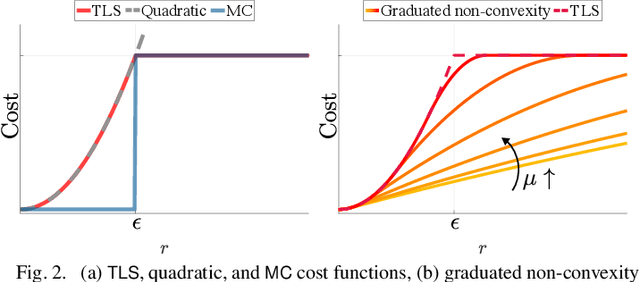
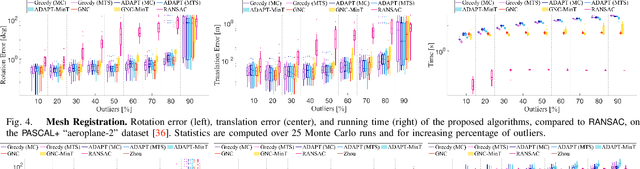
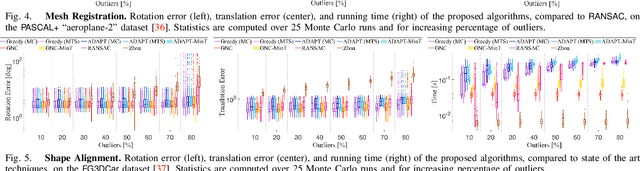
Nonlinear estimation in robotics and vision is typically plagued with outliers due to wrong data association, or to incorrect detections from signal processing and machine learning methods. This paper introduces two unifying formulations for outlier-robust estimation, Generalized Maximum Consensus (G- MC) and Generalized Truncated Least Squares (G-TLS), and investigates fundamental limits, practical algorithms, and applications. Our first contribution is a proof that outlier-robust estimation is inapproximable: in the worst case, it is impossible to (even approximately) find the set of outliers, even with slower-than-polynomial-time algorithms (particularly, algorithms running in quasi-polynomial time). As a second contribution, we review and extend two general-purpose algorithms. The first, Adaptive Trimming (ADAPT), is combinatorial, and is suitable for G-MC; the second, Graduated Non-Convexity (GNC), is based on homotopy methods, and is suitable for G-TLS. We extend ADAPT and GNC to the case where the user does not have prior knowledge of the inlier-noise statistics (or the statistics may vary over time) and is unable to guess a reasonable threshold to separate inliers from outliers (as the one commonly used in RANSAC). We propose the first minimally-tuned algorithms for outlier rejection, that dynamically decide how to separate inliers from outliers. Our third contribution is an evaluation of the proposed algorithms on robot perception problems: mesh registration, image-based object detection (shape alignment), and pose graph optimization. ADAPT and GNC execute in real-time, are deterministic, outperform RANSAC, and are robust to 70-90% outliers. Their minimally-tuned versions also compare favorably with the state of the art, even though they do not rely on a noise bound for the inliers.
Graduated Non-Convexity for Robust Spatial Perception: From Non-Minimal Solvers to Global Outlier Rejection
Sep 18, 2019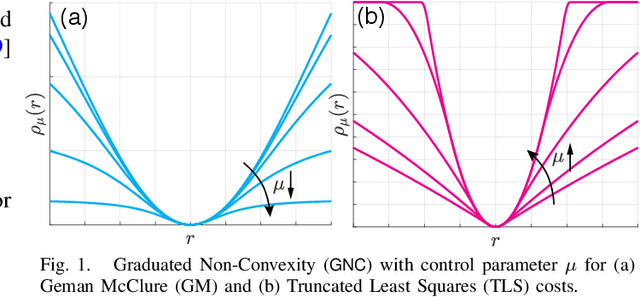



Semidefinite Programming (SDP) and Sums-of-Squares (SOS) relaxations have led to certifiably optimal non-minimal solvers for several robotics and computer vision problems. However, most non-minimal solvers rely on least squares formulations, and, as a result, are brittle against outliers. While a standard approach to regain robustness against outliers is to use robust cost functions, the latter typically introduce other non-convexities, preventing the use of existing non-minimal solvers. In this paper, we enable the simultaneous use of non-minimal solvers and robust estimation by providing a general-purpose approach for robust global estimation, which can be applied to any problem where a non-minimal solver is available for the outlier-free case. To this end, we leverage the Black-Rangarajan duality between robust estimation and outlier processes (which has been traditionally applied to early vision problems), and show that graduated non-convexity (GNC) can be used in conjunction with non-minimal solvers to compute robust solutions, without requiring an initial guess. We demonstrate the resulting robust non-minimal solvers in applications, including point cloud and mesh registration, pose graph optimization, and image-based object pose estimation (also called shape alignment). Our solvers are robust to 70-80% of outliers, outperform RANSAC, are more accurate than specialized local solvers, and faster than specialized global solvers. We also extend the literature on non-minimal solvers by proposing a certifiably optimal SOS solver for shape alignment.
Outlier-Robust Spatial Perception: Hardness, General-Purpose Algorithms, and Guarantees
Mar 27, 2019
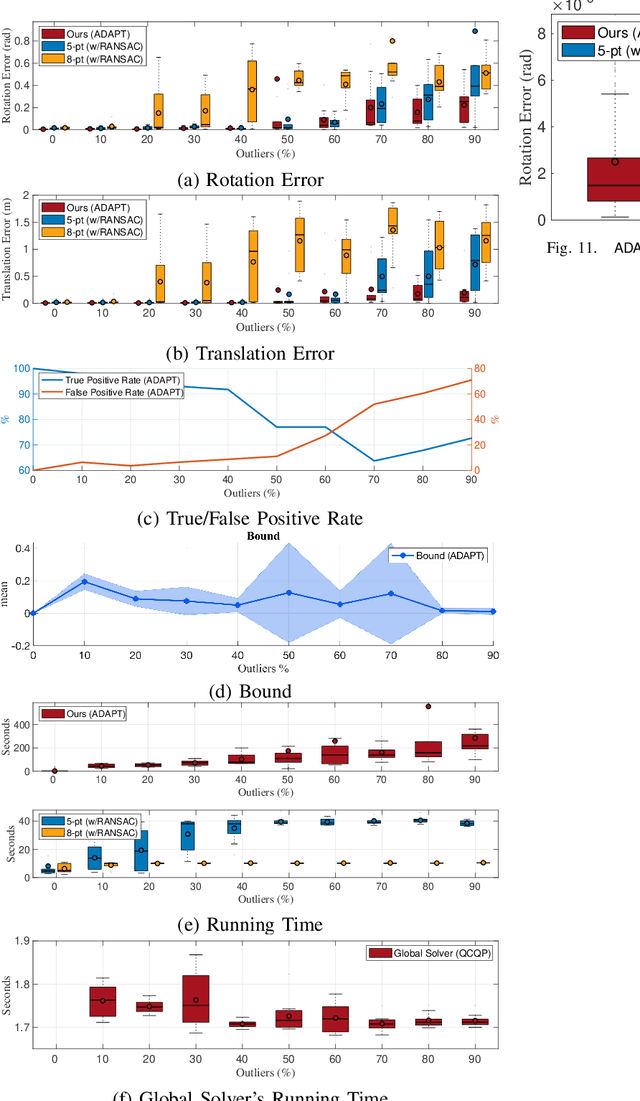

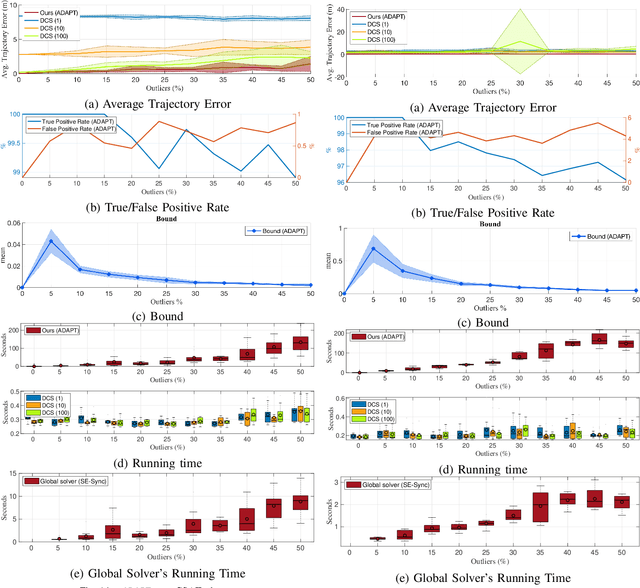
Spatial perception is the backbone of many robotics applications, and spans a broad range of research problems, including localization and mapping, point cloud alignment, and relative pose estimation from camera images. Robust spatial perception is jeopardized by the presence of incorrect data association, and in general, outliers. Although techniques to handle outliers do exist, they can fail in unpredictable manners (e.g., RANSAC, robust estimators), or can have exponential runtime (e.g., branch-and-bound). In this paper, we advance the state of the art in outlier rejection by making three contributions. First, we show that even a simple linear instance of outlier rejection is inapproximable: in the worst-case one cannot design a quasi-polynomial time algorithm that computes an approximate solution efficiently. Our second contribution is to provide the first per-instance sub-optimality bounds to assess the approximation quality of a given outlier rejection outcome. Our third contribution is to propose a simple general-purpose algorithm, named adaptive trimming, to remove outliers. Our algorithm leverages recently-proposed global solvers that are able to solve outlier-free problems, and iteratively removes measurements with large errors. We demonstrate the proposed algorithm on three spatial perception problems: 3D registration, two-view geometry, and SLAM. The results show that our algorithm outperforms several state-of-the-art methods across applications while being a general-purpose method.