 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonitoring and Diagnosability of Perception Systems
Paper and Code
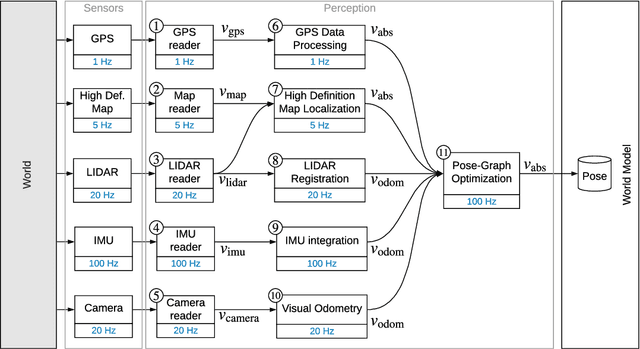
Perception is a critical component of high-integrity applications of robotics and autonomous systems, such as self-driving vehicles. In these applications, failure of perception systems may put human life at risk, and a broad adoption of these technologies requires the development of methodologies to guarantee and monitor safe operation. Despite the paramount importance of perception systems, currently there is no formal approach for system-level monitoring. In this work, we propose a mathematical model for runtime monitoring and fault detection and identification in perception systems. Towards this goal, we draw connections with the literature on diagnosability in multiprocessor systems, and generalize it to account for modules with heterogeneous outputs that interact over time. The resulting temporal diagnostic graphs (i) provide a framework to reason over the consistency of perception outputs -- across modules and over time -- thus enabling fault detection, (ii) allow us to establish formal guarantees on the maximum number of faults that can be uniquely identified in a given perception system, and (iii) enable the design of efficient algorithms for fault identification. We demonstrate our monitoring system, dubbed PerSyS, in realistic simulations using the LGSVL self-driving simulator and the Apollo Auto autonomy software stack, and show that PerSyS is able to detect failures in challenging scenarios (including scenarios that have caused self-driving car accidents in recent years), and is able to correctly identify faults while entailing a minimal computation overhead (< 5ms on a single-core CPU).