 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttribution-Driven Explainable Intrusion Detection with Encoder-Based Large Language Models
Apr 07, 2026Software-Defined Networking (SDN) improves network flexibility but also increases the need for reliable and interpretable intrusion detection. Large Language Models (LLMs) have recently been explored for cybersecurity tasks due to their strong representation learning capabilities; however, their lack of transparency limits their practical adoption in security-critical environments. Understanding how LLMs make decisions is therefore essential. This paper presents an attribution-driven analysis of encoder-based LLMs for network intrusion detection using flow-level traffic features. Attribution analysis demonstrates that model decisions are driven by meaningful traffic behavior patterns, improving transparency and trust in transformer-based SDN intrusion detection. These patterns align with established intrusion detection principles, indicating that LLMs learn attack behavior from traffic dynamics. This work demonstrates the value of attribution methods for validating and trusting LLM-based security analysis.
A Survey on Privacy Attacks Against Digital Twin Systems in AI-Robotics
Jun 27, 2024



Industry 4.0 has witnessed the rise of complex robots fueled by the integration of Artificial Intelligence/Machine Learning (AI/ML) and Digital Twin (DT) technologies. While these technologies offer numerous benefits, they also introduce potential privacy and security risks. This paper surveys privacy attacks targeting robots enabled by AI and DT models. Exfiltration and data leakage of ML models are discussed in addition to the potential extraction of models derived from first-principles (e.g., physics-based). We also discuss design considerations with DT-integrated robotics touching on the impact of ML model training, responsible AI and DT safeguards, data governance and ethical considerations on the effectiveness of these attacks. We advocate for a trusted autonomy approach, emphasizing the need to combine robotics, AI, and DT technologies with robust ethical frameworks and trustworthiness principles for secure and reliable AI robotic systems.
Bayesian-Guided Generation of Synthetic Microbiomes with Minimized Pathogenicity
Apr 29, 2024
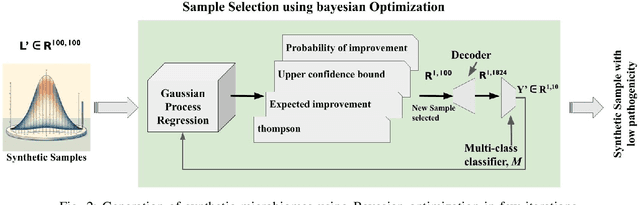
Synthetic microbiomes offer new possibilities for modulating microbiota, to address the barriers in multidtug resistance (MDR) research. We present a Bayesian optimization approach to enable efficient searching over the space of synthetic microbiome variants to identify candidates predictive of reduced MDR. Microbiome datasets were encoded into a low-dimensional latent space using autoencoders. Sampling from this space allowed generation of synthetic microbiome signatures. Bayesian optimization was then implemented to select variants for biological screening to maximize identification of designs with restricted MDR pathogens based on minimal samples. Four acquisition functions were evaluated: expected improvement, upper confidence bound, Thompson sampling, and probability of improvement. Based on each strategy, synthetic samples were prioritized according to their MDR detection. Expected improvement, upper confidence bound, and probability of improvement consistently produced synthetic microbiome candidates with significantly fewer searches than Thompson sampling. By combining deep latent space mapping and Bayesian learning for efficient guided screening, this study demonstrated the feasibility of creating bespoke synthetic microbiomes with customized MDR profiles.
EndToEndML: An Open-Source End-to-End Pipeline for Machine Learning Applications
Mar 27, 2024



Artificial intelligence (AI) techniques are widely applied in the life sciences. However, applying innovative AI techniques to understand and deconvolute biological complexity is hindered by the learning curve for life science scientists to understand and use computing languages. An open-source, user-friendly interface for AI models, that does not require programming skills to analyze complex biological data will be extremely valuable to the bioinformatics community. With easy access to different sequencing technologies and increased interest in different 'omics' studies, the number of biological datasets being generated has increased and analyzing these high-throughput datasets is computationally demanding. The majority of AI libraries today require advanced programming skills as well as machine learning, data preprocessing, and visualization skills. In this research, we propose a web-based end-to-end pipeline that is capable of preprocessing, training, evaluating, and visualizing machine learning (ML) models without manual intervention or coding expertise. By integrating traditional machine learning and deep neural network models with visualizations, our library assists in recognizing, classifying, clustering, and predicting a wide range of multi-modal, multi-sensor datasets, including images, languages, and one-dimensional numerical data, for drug discovery, pathogen classification, and medical diagnostics.
Towards Interpreting Multi-Objective Feature Associations
Feb 28, 2024
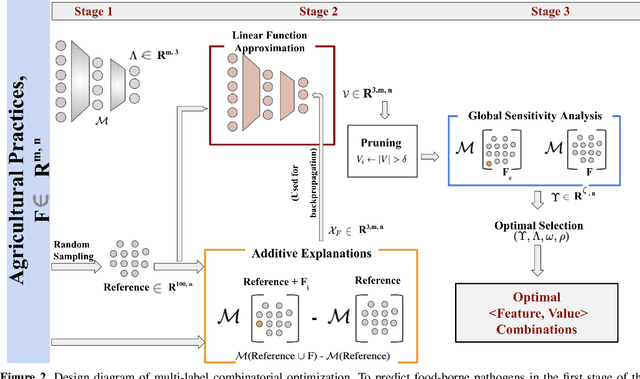

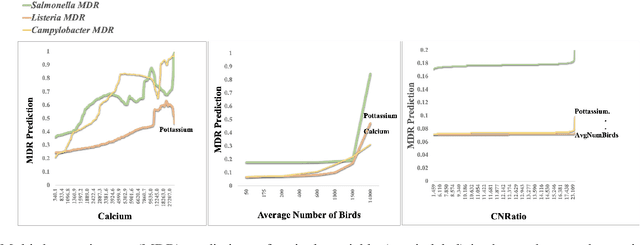
Understanding how multiple features are associated and contribute to a specific objective is as important as understanding how each feature contributes to a particular outcome. Interpretability of a single feature in a prediction may be handled in multiple ways; however, in a multi-objective prediction, it is difficult to obtain interpretability of a combination of feature values. To address this issue, we propose an objective specific feature interaction design using multi-labels to find the optimal combination of features in agricultural settings. One of the novel aspects of this design is the identification of a method that integrates feature explanations with global sensitivity analysis in order to ensure combinatorial optimization in multi-objective settings. We have demonstrated in our preliminary experiments that an approximate combination of feature values can be found to achieve the desired outcome using two agricultural datasets: one with pre-harvest poultry farm practices for multi-drug resistance presence, and one with post-harvest poultry farm practices for food-borne pathogens. In our combinatorial optimization approach, all three pathogens are taken into consideration simultaneously to account for the interaction between conditions that favor different types of pathogen growth. These results indicate that explanation-based approaches are capable of identifying combinations of features that reduce pathogen presence in fewer iterations than a baseline.
Deep Sensitivity Analysis for Objective-Oriented Combinatorial Optimization
Feb 28, 2024Pathogen control is a critical aspect of modern poultry farming, providing important benefits for both public health and productivity. Effective poultry management measures to reduce pathogen levels in poultry flocks promote food safety by lowering risks of food-borne illnesses. They also support animal health and welfare by preventing infectious diseases that can rapidly spread and impact flock growth, egg production, and overall health. This study frames the search for optimal management practices that minimize the presence of multiple pathogens as a combinatorial optimization problem. Specifically, we model the various possible combinations of management settings as a solution space that can be efficiently explored to identify configurations that optimally reduce pathogen levels. This design incorporates a neural network feedback-based method that combines feature explanations with global sensitivity analysis to ensure combinatorial optimization in multiobjective settings. Our preliminary experiments have promising results when applied to two real-world agricultural datasets. While further validation is still needed, these early experimental findings demonstrate the potential of the model to derive targeted feature interactions that adaptively optimize pathogen control under varying real-world constraints.
Security Considerations in AI-Robotics: A Survey of Current Methods, Challenges, and Opportunities
Oct 18, 2023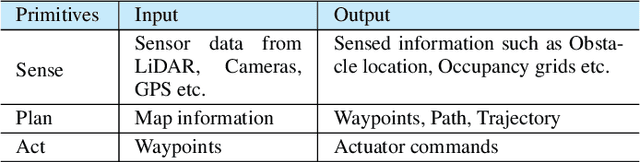
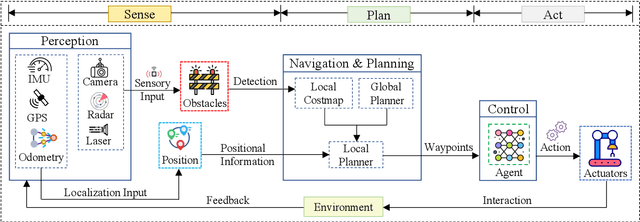
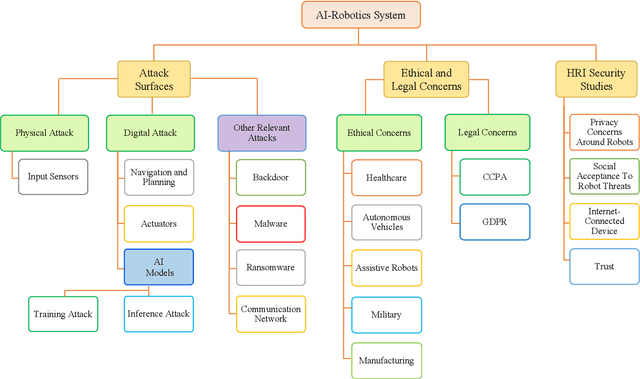
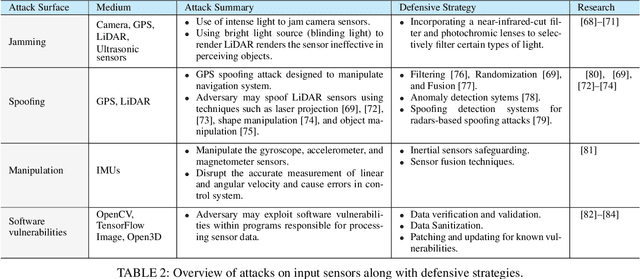
Robotics and Artificial Intelligence (AI) have been inextricably intertwined since their inception. Today, AI-Robotics systems have become an integral part of our daily lives, from robotic vacuum cleaners to semi-autonomous cars. These systems are built upon three fundamental architectural elements: perception, navigation and planning, and control. However, while the integration of AI-Robotics systems has enhanced the quality our lives, it has also presented a serious problem - these systems are vulnerable to security attacks. The physical components, algorithms, and data that make up AI-Robotics systems can be exploited by malicious actors, potentially leading to dire consequences. Motivated by the need to address the security concerns in AI-Robotics systems, this paper presents a comprehensive survey and taxonomy across three dimensions: attack surfaces, ethical and legal concerns, and Human-Robot Interaction (HRI) security. Our goal is to provide users, developers and other stakeholders with a holistic understanding of these areas to enhance the overall AI-Robotics system security. We begin by surveying potential attack surfaces and provide mitigating defensive strategies. We then delve into ethical issues, such as dependency and psychological impact, as well as the legal concerns regarding accountability for these systems. Besides, emerging trends such as HRI are discussed, considering privacy, integrity, safety, trustworthiness, and explainability concerns. Finally, we present our vision for future research directions in this dynamic and promising field.
URA*: Uncertainty-aware Path Planning using Image-based Aerial-to-Ground Traversability Estimation for Off-road Environments
Sep 15, 2023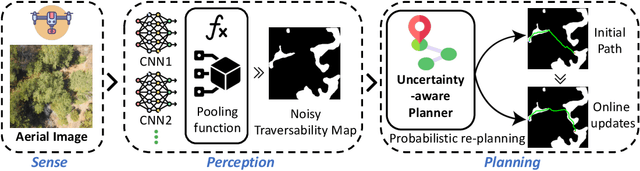
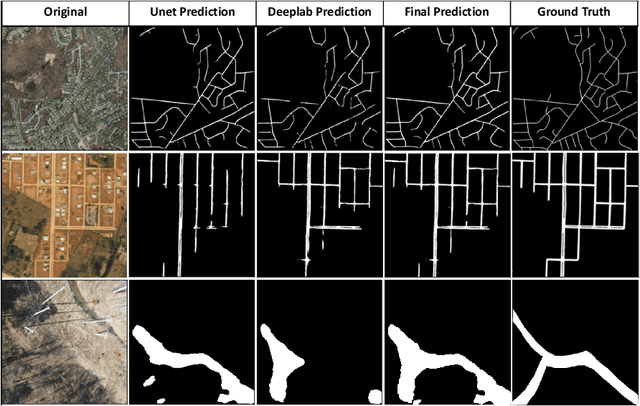
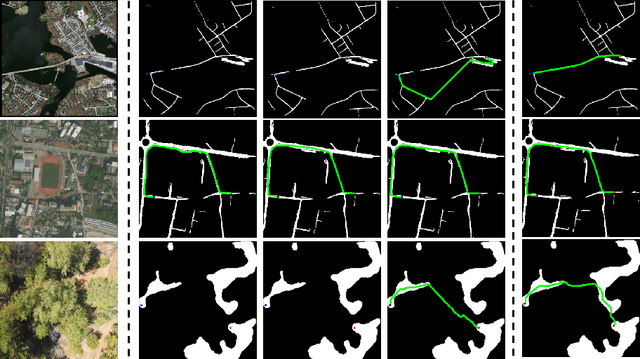
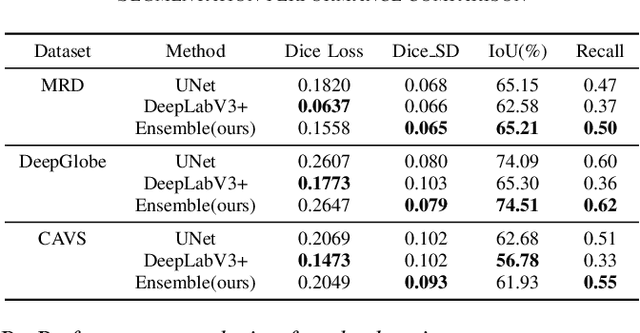
A major challenge with off-road autonomous navigation is the lack of maps or road markings that can be used to plan a path for autonomous robots. Classical path planning methods mostly assume a perfectly known environment without accounting for the inherent perception and sensing uncertainty from detecting terrain and obstacles in off-road environments. Recent work in computer vision and deep neural networks has advanced the capability of terrain traversability segmentation from raw images; however, the feasibility of using these noisy segmentation maps for navigation and path planning has not been adequately explored. To address this problem, this research proposes an uncertainty-aware path planning method, URA* using aerial images for autonomous navigation in off-road environments. An ensemble convolutional neural network (CNN) model is first used to perform pixel-level traversability estimation from aerial images of the region of interest. The traversability predictions are represented as a grid of traversal probability values. An uncertainty-aware planner is then applied to compute the best path from a start point to a goal point given these noisy traversal probability estimates. The proposed planner also incorporates replanning techniques to allow rapid replanning during online robot operation. The proposed method is evaluated on the Massachusetts Road Dataset, the DeepGlobe dataset, as well as a dataset of aerial images from off-road proving grounds at Mississippi State University. Results show that the proposed image segmentation and planning methods outperform conventional planning algorithms in terms of the quality and feasibility of the initial path, as well as the quality of replanned paths.
Neural Variational Learning for Grounded Language Acquisition
Jul 20, 2021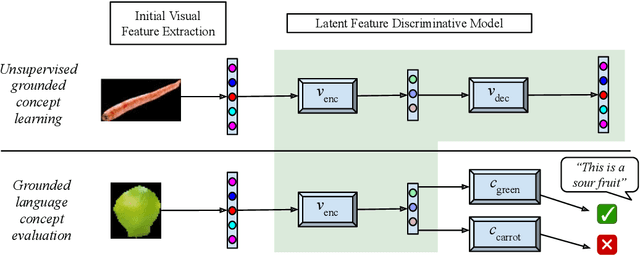



We propose a learning system in which language is grounded in visual percepts without specific pre-defined categories of terms. We present a unified generative method to acquire a shared semantic/visual embedding that enables the learning of language about a wide range of real-world objects. We evaluate the efficacy of this learning by predicting the semantics of objects and comparing the performance with neural and non-neural inputs. We show that this generative approach exhibits promising results in language grounding without pre-specifying visual categories under low resource settings. Our experiments demonstrate that this approach is generalizable to multilingual, highly varied datasets.
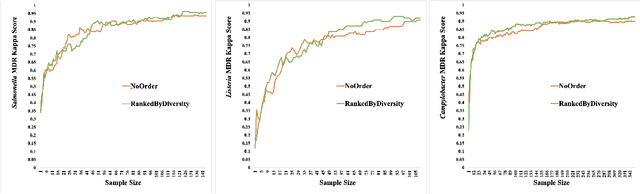
Sampling Approach Matters: Active Learning for Robotic Language Acquisition
Nov 16, 2020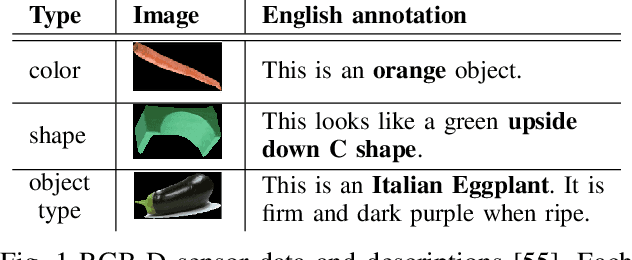
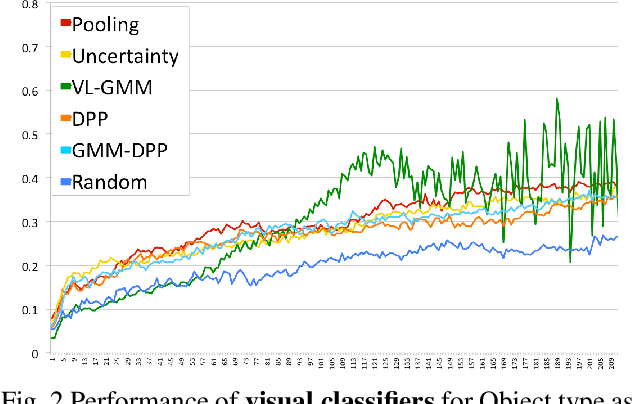
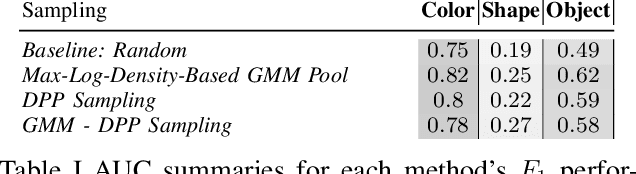
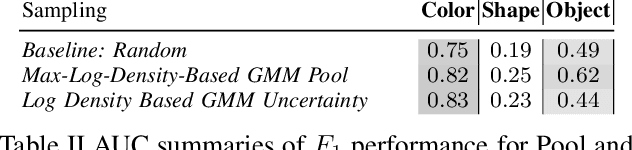
Ordering the selection of training data using active learning can lead to improvements in learning efficiently from smaller corpora. We present an exploration of active learning approaches applied to three grounded language problems of varying complexity in order to analyze what methods are suitable for improving data efficiency in learning. We present a method for analyzing the complexity of data in this joint problem space, and report on how characteristics of the underlying task, along with design decisions such as feature selection and classification model, drive the results. We observe that representativeness, along with diversity, is crucial in selecting data samples.