 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFALCON: Autonomous Cyber Threat Intelligence Mining with LLMs for IDS Rule Generation
Aug 26, 2025Signature-based Intrusion Detection Systems (IDS) detect malicious activities by matching network or host activity against predefined rules. These rules are derived from extensive Cyber Threat Intelligence (CTI), which includes attack signatures and behavioral patterns obtained through automated tools and manual threat analysis, such as sandboxing. The CTI is then transformed into actionable rules for the IDS engine, enabling real-time detection and prevention. However, the constant evolution of cyber threats necessitates frequent rule updates, which delay deployment time and weaken overall security readiness. Recent advancements in agentic systems powered by Large Language Models (LLMs) offer the potential for autonomous IDS rule generation with internal evaluation. We introduce FALCON, an autonomous agentic framework that generates deployable IDS rules from CTI data in real-time and evaluates them using built-in multi-phased validators. To demonstrate versatility, we target both network (Snort) and host-based (YARA) mediums and construct a comprehensive dataset of IDS rules with their corresponding CTIs. Our evaluations indicate FALCON excels in automatic rule generation, with an average of 95% accuracy validated by qualitative evaluation with 84% inter-rater agreement among multiple cybersecurity analysts across all metrics. These results underscore the feasibility and effectiveness of LLM-driven data mining for real-time cyber threat mitigation.
Semantic-Aware Contrastive Fine-Tuning: Boosting Multimodal Malware Classification with Discriminative Embeddings
Apr 25, 2025The rapid evolution of malware variants requires robust classification methods to enhance cybersecurity. While Large Language Models (LLMs) offer potential for generating malware descriptions to aid family classification, their utility is limited by semantic embedding overlaps and misalignment with binary behavioral features. We propose a contrastive fine-tuning (CFT) method that refines LLM embeddings via targeted selection of hard negative samples based on cosine similarity, enabling LLMs to distinguish between closely related malware families. Our approach combines high-similarity negatives to enhance discriminative power and mid-tier negatives to increase embedding diversity, optimizing both precision and generalization. Evaluated on the CIC-AndMal-2020 and BODMAS datasets, our refined embeddings are integrated into a multimodal classifier within a Model-Agnostic Meta-Learning (MAML) framework on a few-shot setting. Experiments demonstrate significant improvements: our method achieves 63.15% classification accuracy with as few as 20 samples on CIC-AndMal-2020, outperforming baselines by 11--21 percentage points and surpassing prior negative sampling strategies. Ablation studies confirm the superiority of similarity-based selection over random sampling, with gains of 10-23%. Additionally, fine-tuned LLMs generate attribute-aware descriptions that generalize to unseen variants, bridging textual and binary feature gaps. This work advances malware classification by enabling nuanced semantic distinctions and provides a scalable framework for adapting LLMs to cybersecurity challenges.
Towards a HIPAA Compliant Agentic AI System in Healthcare
Apr 24, 2025Agentic AI systems powered by Large Language Models (LLMs) as their foundational reasoning engine, are transforming clinical workflows such as medical report generation and clinical summarization by autonomously analyzing sensitive healthcare data and executing decisions with minimal human oversight. However, their adoption demands strict compliance with regulatory frameworks such as Health Insurance Portability and Accountability Act (HIPAA), particularly when handling Protected Health Information (PHI). This work-in-progress paper introduces a HIPAA-compliant Agentic AI framework that enforces regulatory compliance through dynamic, context-aware policy enforcement. Our framework integrates three core mechanisms: (1) Attribute-Based Access Control (ABAC) for granular PHI governance, (2) a hybrid PHI sanitization pipeline combining regex patterns and BERT-based model to minimize leakage, and (3) immutable audit trails for compliance verification.
CLINICSUM: Utilizing Language Models for Generating Clinical Summaries from Patient-Doctor Conversations
Dec 05, 2024



This paper presents ClinicSum, a novel framework designed to automatically generate clinical summaries from patient-doctor conversations. It utilizes a two-module architecture: a retrieval-based filtering module that extracts Subjective, Objective, Assessment, and Plan (SOAP) information from conversation transcripts, and an inference module powered by fine-tuned Pre-trained Language Models (PLMs), which leverage the extracted SOAP data to generate abstracted clinical summaries. To fine-tune the PLM, we created a training dataset of consisting 1,473 conversations-summaries pair by consolidating two publicly available datasets, FigShare and MTS-Dialog, with ground truth summaries validated by Subject Matter Experts (SMEs). ClinicSum's effectiveness is evaluated through both automatic metrics (e.g., ROUGE, BERTScore) and expert human assessments. Results show that ClinicSum outperforms state-of-the-art PLMs, demonstrating superior precision, recall, and F-1 scores in automatic evaluations and receiving high preference from SMEs in human assessment, making it a robust solution for automated clinical summarization.
IRSKG: Unified Intrusion Response System Knowledge Graph Ontology for Cyber Defense
Nov 23, 2024



Cyberattacks are becoming increasingly difficult to detect and prevent due to their sophistication. In response, Autonomous Intelligent Cyber-defense Agents (AICAs) are emerging as crucial solutions. One prominent AICA agent is the Intrusion Response System (IRS), which is critical for mitigating threats after detection. IRS uses several Tactics, Techniques, and Procedures (TTPs) to mitigate attacks and restore the infrastructure to normal operations. Continuous monitoring of the enterprise infrastructure is an essential TTP the IRS uses. However, each system serves different purposes to meet operational needs. Integrating these disparate sources for continuous monitoring increases pre-processing complexity and limits automation, eventually prolonging critical response time for attackers to exploit. We propose a unified IRS Knowledge Graph ontology (IRSKG) that streamlines the onboarding of new enterprise systems as a source for the AICAs. Our ontology can capture system monitoring logs and supplemental data, such as a rules repository containing the administrator-defined policies to dictate the IRS responses. Besides, our ontology permits us to incorporate dynamic changes to adapt to the evolving cyber-threat landscape. This robust yet concise design allows machine learning models to train effectively and recover a compromised system to its desired state autonomously with explainability.
Transfer Learning Applied to Computer Vision Problems: Survey on Current Progress, Limitations, and Opportunities
Sep 12, 2024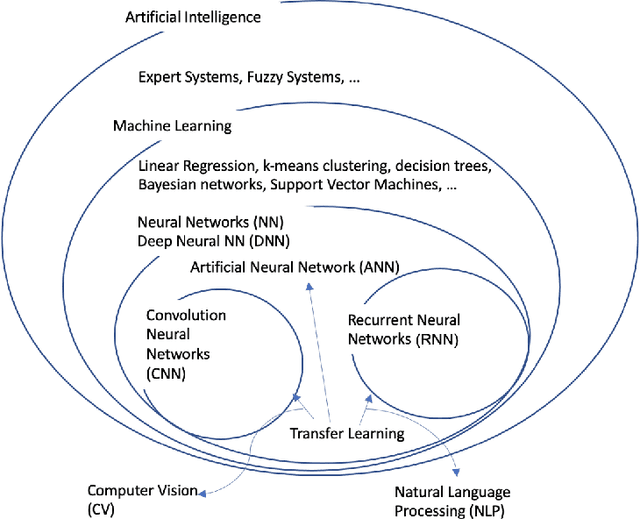

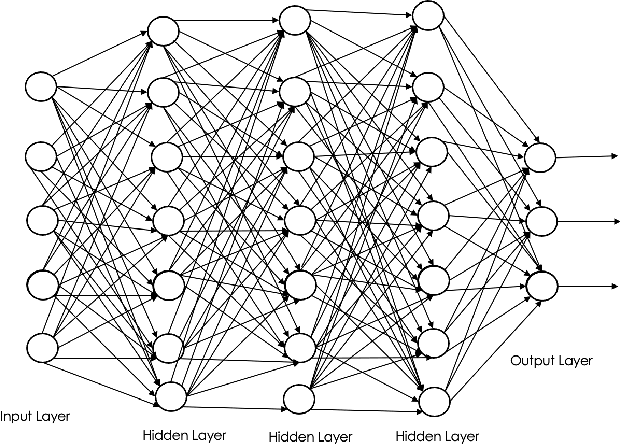

The field of Computer Vision (CV) has faced challenges. Initially, it relied on handcrafted features and rule-based algorithms, resulting in limited accuracy. The introduction of machine learning (ML) has brought progress, particularly Transfer Learning (TL), which addresses various CV problems by reusing pre-trained models. TL requires less data and computing while delivering nearly equal accuracy, making it a prominent technique in the CV landscape. Our research focuses on TL development and how CV applications use it to solve real-world problems. We discuss recent developments, limitations, and opportunities.
A Survey on Privacy Attacks Against Digital Twin Systems in AI-Robotics
Jun 27, 2024



Industry 4.0 has witnessed the rise of complex robots fueled by the integration of Artificial Intelligence/Machine Learning (AI/ML) and Digital Twin (DT) technologies. While these technologies offer numerous benefits, they also introduce potential privacy and security risks. This paper surveys privacy attacks targeting robots enabled by AI and DT models. Exfiltration and data leakage of ML models are discussed in addition to the potential extraction of models derived from first-principles (e.g., physics-based). We also discuss design considerations with DT-integrated robotics touching on the impact of ML model training, responsible AI and DT safeguards, data governance and ethical considerations on the effectiveness of these attacks. We advocate for a trusted autonomy approach, emphasizing the need to combine robotics, AI, and DT technologies with robust ethical frameworks and trustworthiness principles for secure and reliable AI robotic systems.
MedInsight: A Multi-Source Context Augmentation Framework for Generating Patient-Centric Medical Responses using Large Language Models
Mar 13, 2024



Large Language Models (LLMs) have shown impressive capabilities in generating human-like responses. However, their lack of domain-specific knowledge limits their applicability in healthcare settings, where contextual and comprehensive responses are vital. To address this challenge and enable the generation of patient-centric responses that are contextually relevant and comprehensive, we propose MedInsight:a novel retrieval augmented framework that augments LLM inputs (prompts) with relevant background information from multiple sources. MedInsight extracts pertinent details from the patient's medical record or consultation transcript. It then integrates information from authoritative medical textbooks and curated web resources based on the patient's health history and condition. By constructing an augmented context combining the patient's record with relevant medical knowledge, MedInsight generates enriched, patient-specific responses tailored for healthcare applications such as diagnosis, treatment recommendations, or patient education. Experiments on the MTSamples dataset validate MedInsight's effectiveness in generating contextually appropriate medical responses. Quantitative evaluation using the Ragas metric and TruLens for answer similarity and answer correctness demonstrates the model's efficacy. Furthermore, human evaluation studies involving Subject Matter Expert (SMEs) confirm MedInsight's utility, with moderate inter-rater agreement on the relevance and correctness of the generated responses.
LOCALINTEL: Generating Organizational Threat Intelligence from Global and Local Cyber Knowledge
Jan 18, 2024Security Operations Center (SoC) analysts gather threat reports from openly accessible global threat databases and customize them manually to suit a particular organization's needs. These analysts also depend on internal repositories, which act as private local knowledge database for an organization. Credible cyber intelligence, critical operational details, and relevant organizational information are all stored in these local knowledge databases. Analysts undertake a labor intensive task utilizing these global and local knowledge databases to manually create organization's unique threat response and mitigation strategies. Recently, Large Language Models (LLMs) have shown the capability to efficiently process large diverse knowledge sources. We leverage this ability to process global and local knowledge databases to automate the generation of organization-specific threat intelligence. In this work, we present LOCALINTEL, a novel automated knowledge contextualization system that, upon prompting, retrieves threat reports from the global threat repositories and uses its local knowledge database to contextualize them for a specific organization. LOCALINTEL comprises of three key phases: global threat intelligence retrieval, local knowledge retrieval, and contextualized completion generation. The former retrieves intelligence from global threat repositories, while the second retrieves pertinent knowledge from the local knowledge database. Finally, the fusion of these knowledge sources is orchestrated through a generator to produce a contextualized completion.
Use of Graph Neural Networks in Aiding Defensive Cyber Operations
Jan 11, 2024In an increasingly interconnected world, where information is the lifeblood of modern society, regular cyber-attacks sabotage the confidentiality, integrity, and availability of digital systems and information. Additionally, cyber-attacks differ depending on the objective and evolve rapidly to disguise defensive systems. However, a typical cyber-attack demonstrates a series of stages from attack initiation to final resolution, called an attack life cycle. These diverse characteristics and the relentless evolution of cyber attacks have led cyber defense to adopt modern approaches like Machine Learning to bolster defensive measures and break the attack life cycle. Among the adopted ML approaches, Graph Neural Networks have emerged as a promising approach for enhancing the effectiveness of defensive measures due to their ability to process and learn from heterogeneous cyber threat data. In this paper, we look into the application of GNNs in aiding to break each stage of one of the most renowned attack life cycles, the Lockheed Martin Cyber Kill Chain. We address each phase of CKC and discuss how GNNs contribute to preparing and preventing an attack from a defensive standpoint. Furthermore, We also discuss open research areas and further improvement scopes.