 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Privacy Attacks Against Digital Twin Systems in AI-Robotics
Jun 27, 2024



Industry 4.0 has witnessed the rise of complex robots fueled by the integration of Artificial Intelligence/Machine Learning (AI/ML) and Digital Twin (DT) technologies. While these technologies offer numerous benefits, they also introduce potential privacy and security risks. This paper surveys privacy attacks targeting robots enabled by AI and DT models. Exfiltration and data leakage of ML models are discussed in addition to the potential extraction of models derived from first-principles (e.g., physics-based). We also discuss design considerations with DT-integrated robotics touching on the impact of ML model training, responsible AI and DT safeguards, data governance and ethical considerations on the effectiveness of these attacks. We advocate for a trusted autonomy approach, emphasizing the need to combine robotics, AI, and DT technologies with robust ethical frameworks and trustworthiness principles for secure and reliable AI robotic systems.
Security Considerations in AI-Robotics: A Survey of Current Methods, Challenges, and Opportunities
Oct 18, 2023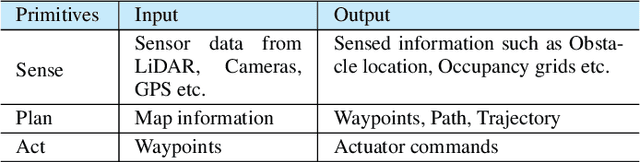
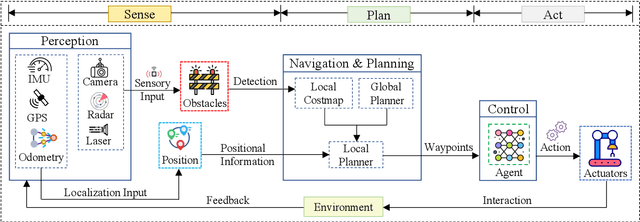
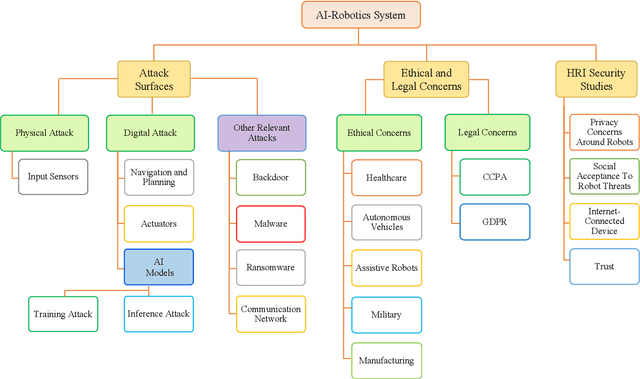
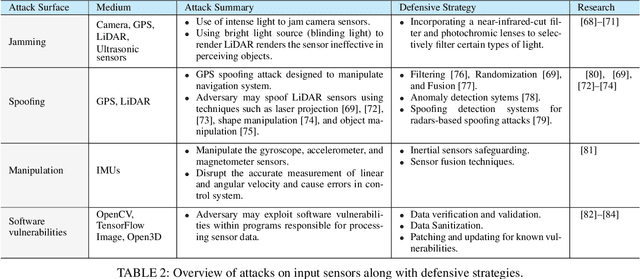
Robotics and Artificial Intelligence (AI) have been inextricably intertwined since their inception. Today, AI-Robotics systems have become an integral part of our daily lives, from robotic vacuum cleaners to semi-autonomous cars. These systems are built upon three fundamental architectural elements: perception, navigation and planning, and control. However, while the integration of AI-Robotics systems has enhanced the quality our lives, it has also presented a serious problem - these systems are vulnerable to security attacks. The physical components, algorithms, and data that make up AI-Robotics systems can be exploited by malicious actors, potentially leading to dire consequences. Motivated by the need to address the security concerns in AI-Robotics systems, this paper presents a comprehensive survey and taxonomy across three dimensions: attack surfaces, ethical and legal concerns, and Human-Robot Interaction (HRI) security. Our goal is to provide users, developers and other stakeholders with a holistic understanding of these areas to enhance the overall AI-Robotics system security. We begin by surveying potential attack surfaces and provide mitigating defensive strategies. We then delve into ethical issues, such as dependency and psychological impact, as well as the legal concerns regarding accountability for these systems. Besides, emerging trends such as HRI are discussed, considering privacy, integrity, safety, trustworthiness, and explainability concerns. Finally, we present our vision for future research directions in this dynamic and promising field.
Impacts and Risk of Generative AI Technology on Cyber Defense
Jun 22, 2023Generative Artificial Intelligence (GenAI) has emerged as a powerful technology capable of autonomously producing highly realistic content in various domains, such as text, images, audio, and videos. With its potential for positive applications in creative arts, content generation, virtual assistants, and data synthesis, GenAI has garnered significant attention and adoption. However, the increasing adoption of GenAI raises concerns about its potential misuse for crafting convincing phishing emails, generating disinformation through deepfake videos, and spreading misinformation via authentic-looking social media posts, posing a new set of challenges and risks in the realm of cybersecurity. To combat the threats posed by GenAI, we propose leveraging the Cyber Kill Chain (CKC) to understand the lifecycle of cyberattacks, as a foundational model for cyber defense. This paper aims to provide a comprehensive analysis of the risk areas introduced by the offensive use of GenAI techniques in each phase of the CKC framework. We also analyze the strategies employed by threat actors and examine their utilization throughout different phases of the CKC, highlighting the implications for cyber defense. Additionally, we propose GenAI-enabled defense strategies that are both attack-aware and adaptive. These strategies encompass various techniques such as detection, deception, and adversarial training, among others, aiming to effectively mitigate the risks posed by GenAI-induced cyber threats.
TwinExplainer: Explaining Predictions of an Automotive Digital Twin
Feb 01, 2023
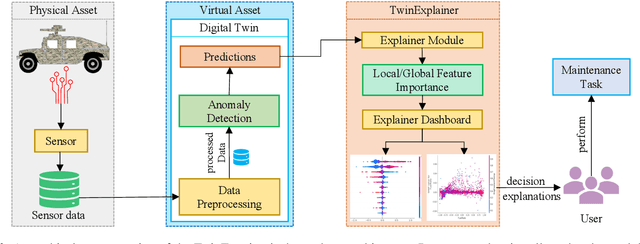


Vehicles are complex Cyber Physical Systems (CPS) that operate in a variety of environments, and the likelihood of failure of one or more subsystems, such as the engine, transmission, brakes, and fuel, can result in unscheduled downtime and incur high maintenance or repair costs. In order to prevent these issues, it is crucial to continuously monitor the health of various subsystems and identify abnormal sensor channel behavior. Data-driven Digital Twin (DT) systems are capable of such a task. Current DT technologies utilize various Deep Learning (DL) techniques that are constrained by the lack of justification or explanation for their predictions. This inability of these opaque systems can influence decision-making and raises user trust concerns. This paper presents a solution to this issue, where the TwinExplainer system, with its three-layered architectural pipeline, explains the predictions of an automotive DT. Such a system can assist automotive stakeholders in understanding the global scale of the sensor channels and how they contribute towards generic DT predictions. TwinExplainer can also visualize explanations for both normal and abnormal local predictions computed by the DT.
A Temporal Anomaly Detection System for Vehicles utilizing Functional Working Groups and Sensor Channels
Sep 14, 2022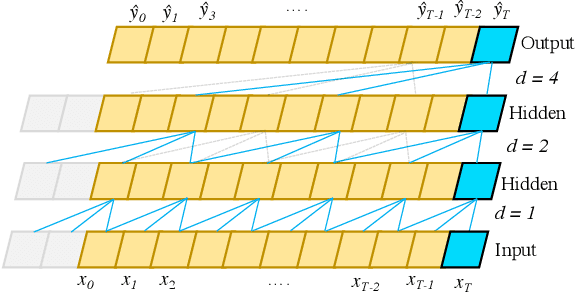
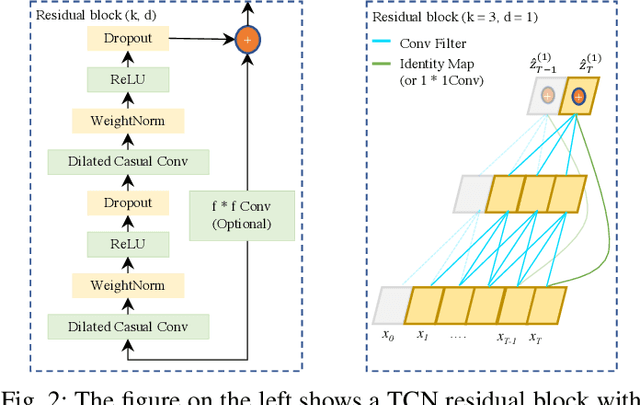
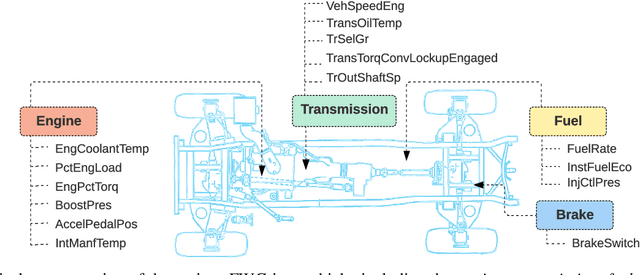
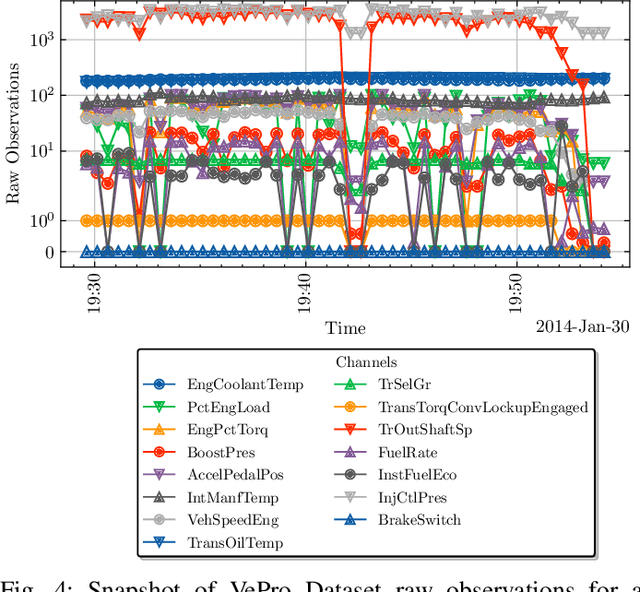
A modern vehicle fitted with sensors, actuators, and Electronic Control Units (ECUs) can be divided into several operational subsystems called Functional Working Groups (FWGs). Examples of these FWGs include the engine system, transmission, fuel system, brakes, etc. Each FWG has associated sensor-channels that gauge vehicular operating conditions. This data rich environment is conducive to the development of Predictive Maintenance (PdM) technologies. Undercutting various PdM technologies is the need for robust anomaly detection models that can identify events or observations which deviate significantly from the majority of the data and do not conform to a well defined notion of normal vehicular operational behavior. In this paper, we introduce the Vehicle Performance, Reliability, and Operations (VePRO) dataset and use it to create a multi-phased approach to anomaly detection. Utilizing Temporal Convolution Networks (TCN), our anomaly detection system can achieve 96% detection accuracy and accurately predicts 91% of true anomalies. The performance of our anomaly detection system improves when sensor channels from multiple FWGs are utilized.