 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwinExplainer: Explaining Predictions of an Automotive Digital Twin
Feb 01, 2023
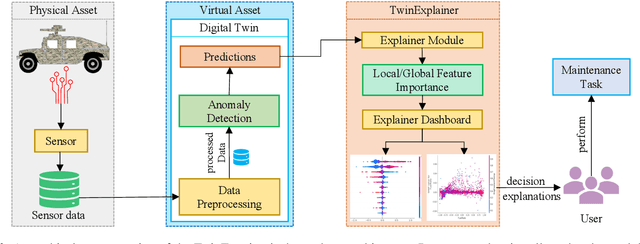


Vehicles are complex Cyber Physical Systems (CPS) that operate in a variety of environments, and the likelihood of failure of one or more subsystems, such as the engine, transmission, brakes, and fuel, can result in unscheduled downtime and incur high maintenance or repair costs. In order to prevent these issues, it is crucial to continuously monitor the health of various subsystems and identify abnormal sensor channel behavior. Data-driven Digital Twin (DT) systems are capable of such a task. Current DT technologies utilize various Deep Learning (DL) techniques that are constrained by the lack of justification or explanation for their predictions. This inability of these opaque systems can influence decision-making and raises user trust concerns. This paper presents a solution to this issue, where the TwinExplainer system, with its three-layered architectural pipeline, explains the predictions of an automotive DT. Such a system can assist automotive stakeholders in understanding the global scale of the sensor channels and how they contribute towards generic DT predictions. TwinExplainer can also visualize explanations for both normal and abnormal local predictions computed by the DT.
A White-Box Adversarial Attack Against a Digital Twin
Oct 25, 2022
Recent research has shown that Machine Learning/Deep Learning (ML/DL) models are particularly vulnerable to adversarial perturbations, which are small changes made to the input data in order to fool a machine learning classifier. The Digital Twin, which is typically described as consisting of a physical entity, a virtual counterpart, and the data connections in between, is increasingly being investigated as a means of improving the performance of physical entities by leveraging computational techniques, which are enabled by the virtual counterpart. This paper explores the susceptibility of Digital Twin (DT), a virtual model designed to accurately reflect a physical object using ML/DL classifiers that operate as Cyber Physical Systems (CPS), to adversarial attacks. As a proof of concept, we first formulate a DT of a vehicular system using a deep neural network architecture and then utilize it to launch an adversarial attack. We attack the DT model by perturbing the input to the trained model and show how easily the model can be broken with white-box attacks.
A Temporal Anomaly Detection System for Vehicles utilizing Functional Working Groups and Sensor Channels
Sep 14, 2022
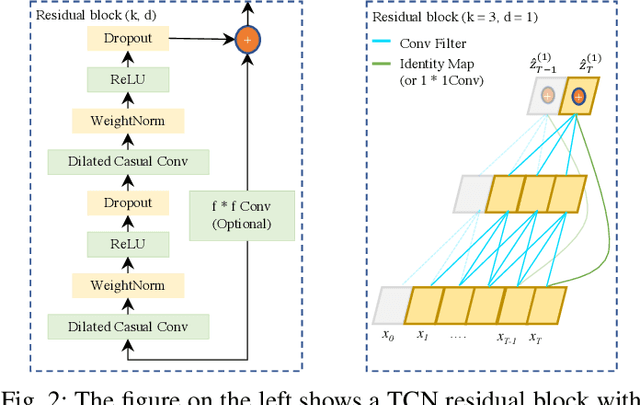
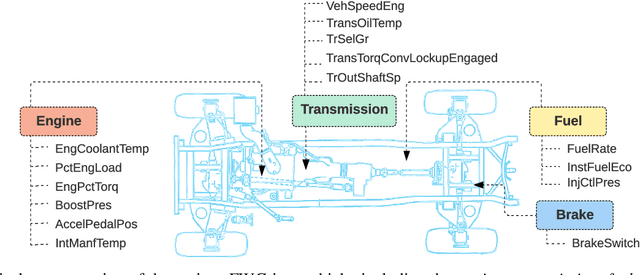
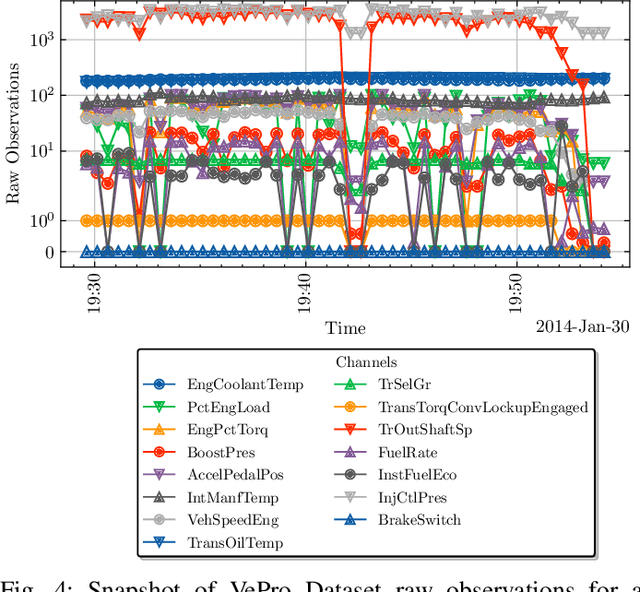
A modern vehicle fitted with sensors, actuators, and Electronic Control Units (ECUs) can be divided into several operational subsystems called Functional Working Groups (FWGs). Examples of these FWGs include the engine system, transmission, fuel system, brakes, etc. Each FWG has associated sensor-channels that gauge vehicular operating conditions. This data rich environment is conducive to the development of Predictive Maintenance (PdM) technologies. Undercutting various PdM technologies is the need for robust anomaly detection models that can identify events or observations which deviate significantly from the majority of the data and do not conform to a well defined notion of normal vehicular operational behavior. In this paper, we introduce the Vehicle Performance, Reliability, and Operations (VePRO) dataset and use it to create a multi-phased approach to anomaly detection. Utilizing Temporal Convolution Networks (TCN), our anomaly detection system can achieve 96% detection accuracy and accurately predicts 91% of true anomalies. The performance of our anomaly detection system improves when sensor channels from multiple FWGs are utilized.