 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproved Bag-of-Words Image Retrieval with Geometric Constraints for Ground Texture Localization
May 16, 2025Ground texture localization using a downward-facing camera offers a low-cost, high-precision localization solution that is robust to dynamic environments and requires no environmental modification. We present a significantly improved bag-of-words (BoW) image retrieval system for ground texture localization, achieving substantially higher accuracy for global localization and higher precision and recall for loop closure detection in SLAM. Our approach leverages an approximate $k$-means (AKM) vocabulary with soft assignment, and exploits the consistent orientation and constant scale constraints inherent to ground texture localization. Identifying the different needs of global localization vs. loop closure detection for SLAM, we present both high-accuracy and high-speed versions of our algorithm. We test the effect of each of our proposed improvements through an ablation study and demonstrate our method's effectiveness for both global localization and loop closure detection. With numerous ground texture localization systems already using BoW, our method can readily replace other generic BoW systems in their pipeline and immediately improve their results.
Monotone Subsystem Decomposition for Efficient Multi-Objective Robot Design
May 16, 2025Automating design minimizes errors, accelerates the design process, and reduces cost. However, automating robot design is challenging due to recursive constraints, multiple design objectives, and cross-domain design complexity possibly spanning multiple abstraction layers. Here we look at the problem of component selection, a combinatorial optimization problem in which a designer, given a robot model, must select compatible components from an extensive catalog. The goal is to satisfy high-level task specifications while optimally balancing trade-offs between competing design objectives. In this paper, we extend our previous constraint programming approach to multi-objective design problems and propose the novel technique of monotone subsystem decomposition to efficiently compute a Pareto front of solutions for large-scale problems. We prove that subsystems can be optimized for their Pareto fronts and, under certain conditions, these results can be used to determine a globally optimal Pareto front. Furthermore, subsystems serve as an intuitive design abstraction and can be reused across various design problems. Using an example quadcopter design problem, we compare our method to a linear programming approach and demonstrate our method scales better for large catalogs, solving a multi-objective problem of 10^25 component combinations in seconds. We then expand the original problem and solve a task-oriented, multi-objective design problem to build a fleet of quadcopters to deliver packages. We compute a Pareto front of solutions in seconds where each solution contains an optimal component-level design and an optimal package delivery schedule for each quadcopter.
ACHORD: Communication-Aware Multi-Robot Coordination with Intermittent Connectivity
Jun 05, 2022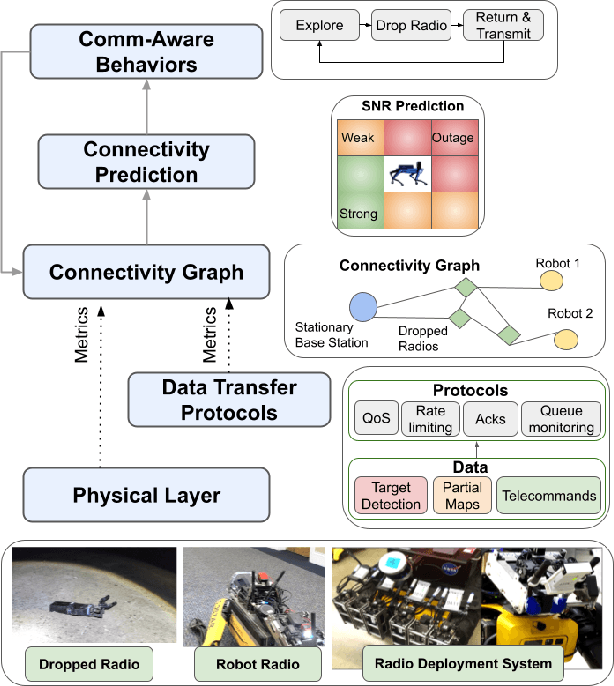
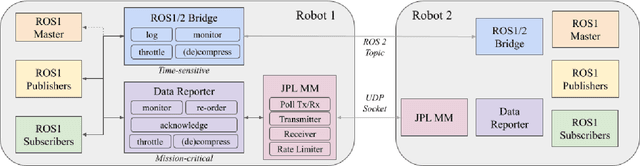
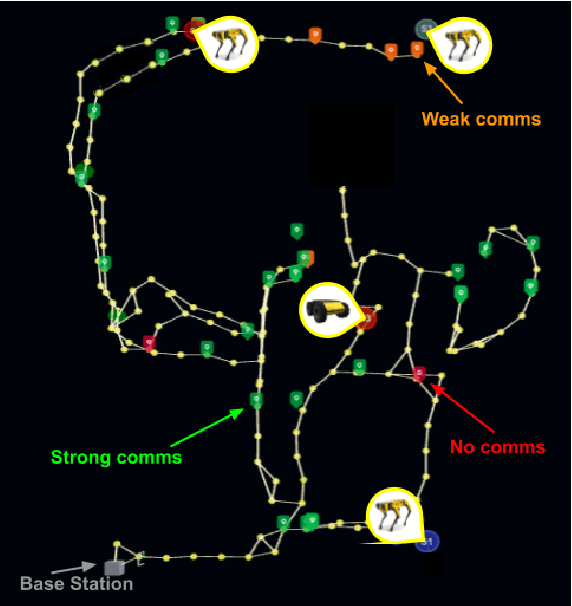
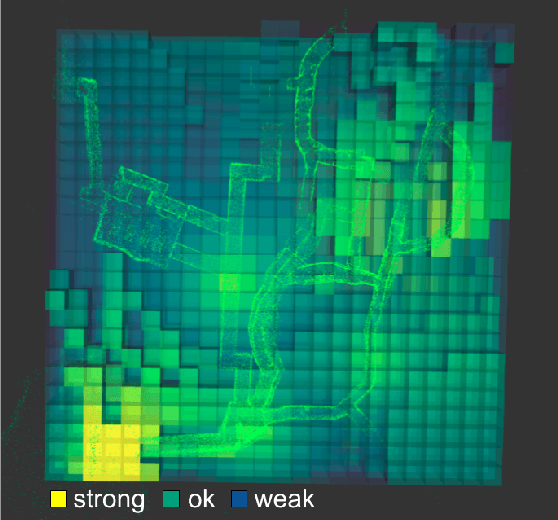
Communication is an important capability for multi-robot exploration because (1) inter-robot communication (comms) improves coverage efficiency and (2) robot-to-base comms improves situational awareness. Exploring comms-restricted (e.g., subterranean) environments requires a multi-robot system to tolerate and anticipate intermittent connectivity, and to carefully consider comms requirements, otherwise mission-critical data may be lost. In this paper, we describe and analyze ACHORD (Autonomous & Collaborative High-Bandwidth Operations with Radio Droppables), a multi-layer networking solution which tightly co-designs the network architecture and high-level decision-making for improved comms. ACHORD provides bandwidth prioritization and timely and reliable data transfer despite intermittent connectivity. Furthermore, it exposes low-layer networking metrics to the application layer to enable robots to autonomously monitor, map, and extend the network via droppable radios, as well as restore connectivity to improve collaborative exploration. We evaluate our solution with respect to the comms performance in several challenging underground environments including the DARPA SubT Finals competition environment. Our findings support the use of data stratification and flow control to improve bandwidth-usage.
Active Face Frontalization using Commodity Unmanned Aerial Vehicles
Feb 17, 2021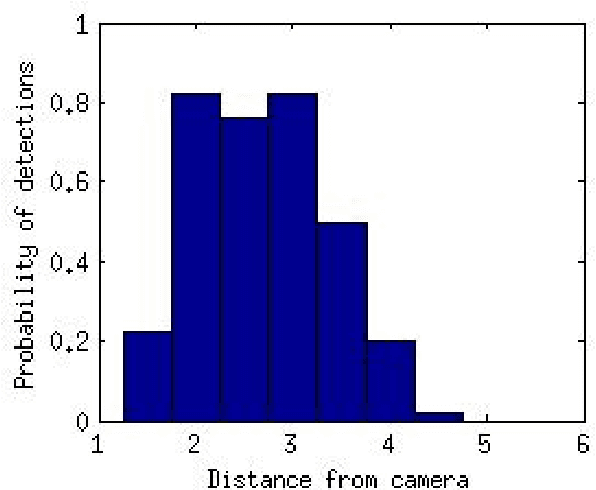

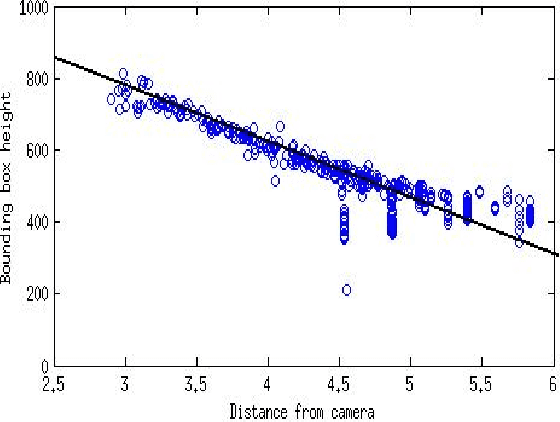
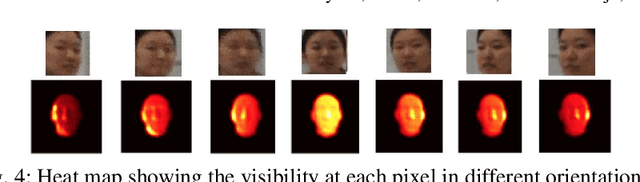
This paper describes a system by which Unmanned Aerial Vehicles (UAVs) can gather high-quality face images that can be used in biometric identification tasks. Success in face-based identification depends in large part on the image quality, and a major factor is how frontal the view is. Face recognition software pipelines can improve identification rates by synthesizing frontal views from non-frontal views by a process call {\em frontalization}. Here we exploit the high mobility of UAVs to actively gather frontal images using components of a synthetic frontalization pipeline. We define a frontalization error and show that it can be used to guide an UAVs to capture frontal views. Further, we show that the resulting image stream improves matching quality of a typical face recognition similarity metric. The system is implemented using an off-the-shelf hardware and software components and can be easily transfered to any ROS enabled UAVs.
Entropy-Isomap: Manifold Learning for High-dimensional Dynamic Processes
Aug 06, 2018
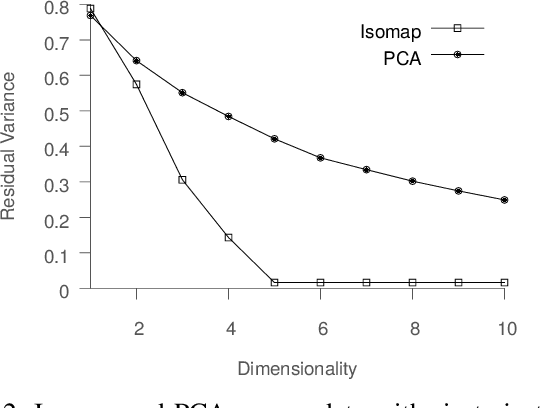

Scientific and engineering processes deliver massive high-dimensional data sets that are generated as non-linear transformations of an initial state and few process parameters. Mapping such data to a low-dimensional manifold facilitates better understanding of the underlying processes, and enables their optimization. In this paper, we first show that off-the-shelf non-linear spectral dimensionality reduction methods, e.g., Isomap, fail for such data, primarily due to the presence of strong temporal correlations. Then, we propose a novel method, Entropy-Isomap, to address the issue. The proposed method is successfully applied to large data describing a fabrication process of organic materials. The resulting low-dimensional representation correctly captures process control variables, allows for low-dimensional visualization of the material morphology evolution, and provides key insights to improve the process.
On Optimality Conditions for Auto-Encoder Signal Recovery
Jul 13, 2017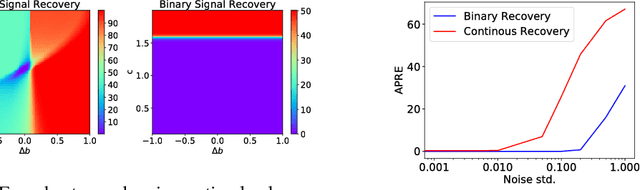

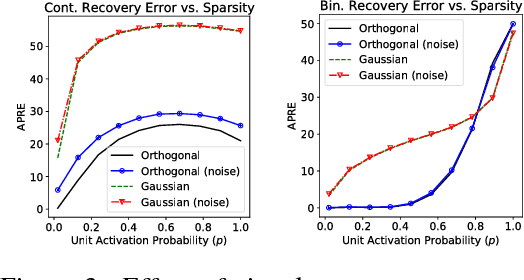
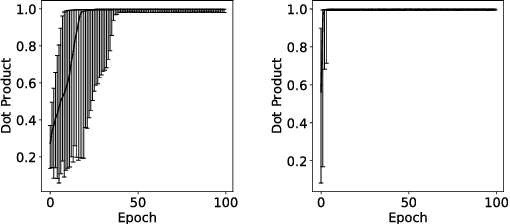
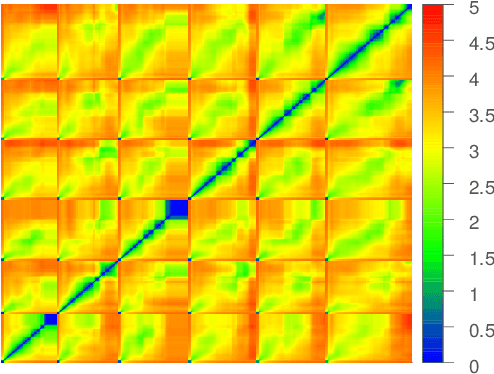
Auto-Encoders are unsupervised models that aim to learn patterns from observed data by minimizing a reconstruction cost. The useful representations learned are often found to be sparse and distributed. On the other hand, compressed sensing and sparse coding assume a data generating process, where the observed data is generated from some true latent signal source, and try to recover the corresponding signal from measurements. Looking at auto-encoders from this \textit{signal recovery perspective} enables us to have a more coherent view of these techniques. In this paper, in particular, we show that the \textit{true} hidden representation can be approximately recovered if the weight matrices are highly incoherent with unit $ \ell^{2} $ row length and the bias vectors takes the value (approximately) equal to the negative of the data mean. The recovery also becomes more and more accurate as the sparsity in hidden signals increases. Additionally, we empirically demonstrate that auto-encoders are capable of recovering the data generating dictionary when only data samples are given.
Error Metrics for Learning Reliable Manifolds from Streaming Data
Jan 11, 2017
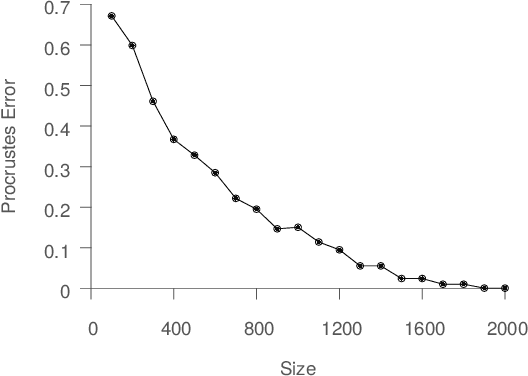
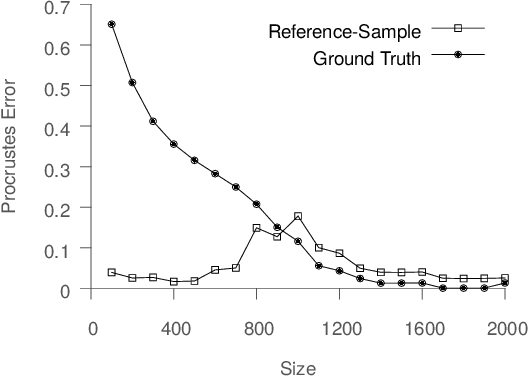

Spectral dimensionality reduction is frequently used to identify low-dimensional structure in high-dimensional data. However, learning manifolds, especially from the streaming data, is computationally and memory expensive. In this paper, we argue that a stable manifold can be learned using only a fraction of the stream, and the remaining stream can be mapped to the manifold in a significantly less costly manner. Identifying the transition point at which the manifold is stable is the key step. We present error metrics that allow us to identify the transition point for a given stream by quantitatively assessing the quality of a manifold learned using Isomap. We further propose an efficient mapping algorithm, called S-Isomap, that can be used to map new samples onto the stable manifold. We describe experiments on a variety of data sets that show that the proposed approach is computationally efficient without sacrificing accuracy.