 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding Things in the Unknown: Semantic Object-Centric Exploration with an MAV
Mar 03, 2023



Exploration of unknown space with an autonomous mobile robot is a well-studied problem. In this work we broaden the scope of exploration, moving beyond the pure geometric goal of uncovering as much free space as possible. We believe that for many practical applications, exploration should be contextualised with semantic and object-level understanding of the environment for task-specific exploration. Here, we study the task of both finding specific objects in unknown space as well as reconstructing them to a target level of detail. We therefore extend our environment reconstruction to not only consist of a background map, but also object-level and semantically fused submaps. Importantly, we adapt our previous objective function of uncovering as much free space as possible in as little time as possible with two additional elements: first, we require a maximum observation distance of background surfaces to ensure target objects are not missed by image-based detectors because they are too small to be detected. Second, we require an even smaller maximum distance to the found objects in order to reconstruct them with the desired accuracy. We further created a Micro Aerial Vehicle (MAV) semantic exploration simulator based on Habitat in order to quantitatively demonstrate how our framework can be used to efficiently find specific objects as part of exploration. Finally, we showcase this capability can be deployed in real-world scenes involving our drone equipped with an Intel RealSense D455 RGB-D camera.
Efficient Volumetric Mapping Using Depth Completion With Uncertainty for Robotic Navigation
Dec 05, 2020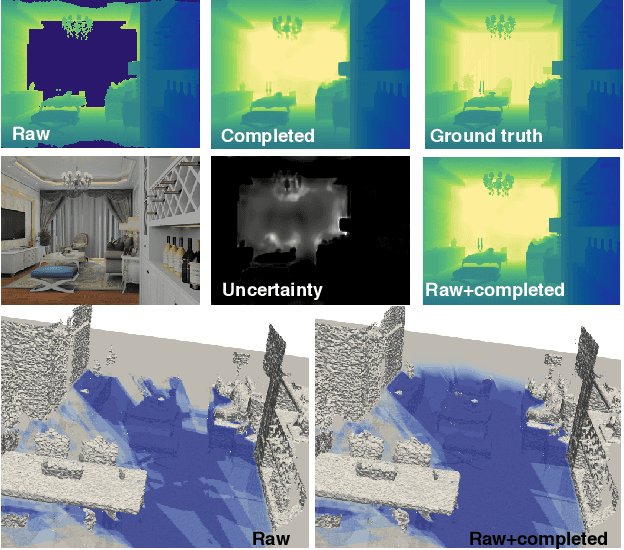
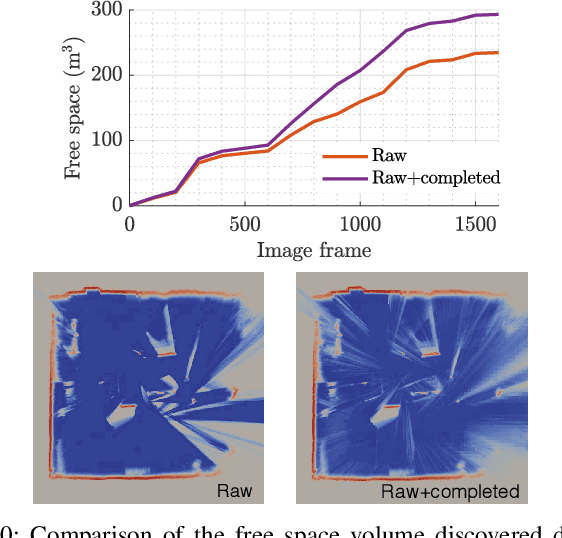
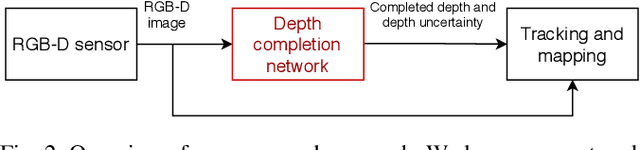
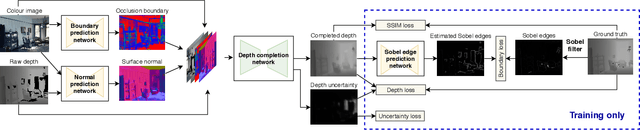
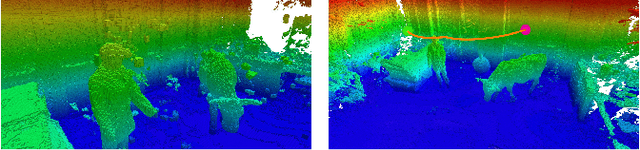
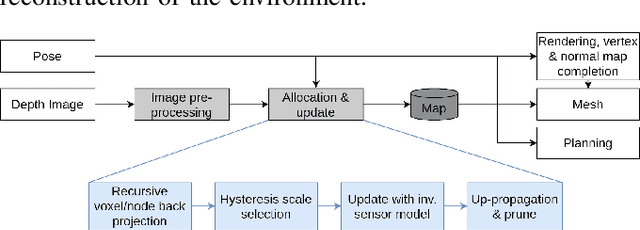
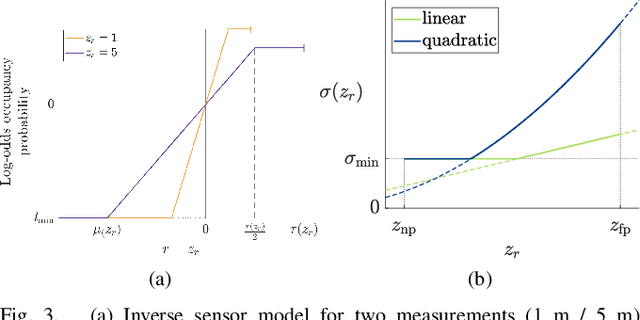
In robotic applications, a key requirement for safe and efficient motion planning is the ability to map obstacle-free space in unknown, cluttered 3D environments. However, commodity-grade RGB-D cameras commonly used for sensing fail to register valid depth values on shiny, glossy, bright, or distant surfaces, leading to missing data in the map. To address this issue, we propose a framework leveraging probabilistic depth completion as an additional input for spatial mapping. We introduce a deep learning architecture providing uncertainty estimates for the depth completion of RGB-D images. Our pipeline exploits the inferred missing depth values and depth uncertainty to complement raw depth images and improve the speed and quality of free space mapping. Evaluations on synthetic data show that our approach maps significantly more correct free space with relatively low error when compared against using raw data alone in different indoor environments; thereby producing more complete maps that can be directly used for robotic navigation tasks. The performance of our framework is validated using real-world data.
Multi-Resolution 3D Mapping with Explicit Free Space Representation for Fast and Accurate Mobile Robot Motion Planning
Oct 19, 2020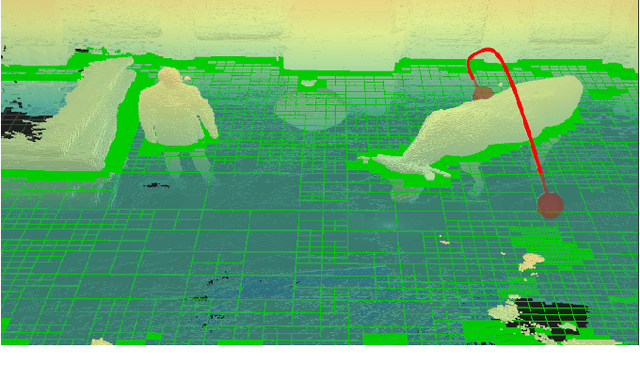
With the aim of bridging the gap between high quality reconstruction and mobile robot motion planning, we propose an efficient system that leverages the concept of adaptive-resolution volumetric mapping, which naturally integrates with the hierarchical decomposition of space in an octree data structure. Instead of a Truncated Signed Distance Function (TSDF), we adopt mapping of occupancy probabilities in log-odds representation, which allows to represent both surfaces, as well as the entire free, i.e. observed space, as opposed to unobserved space. We introduce a method for choosing resolution -- on the fly -- in real-time by means of a multi-scale max-min pooling of the input depth image. The notion of explicit free space mapping paired with the spatial hierarchy in the data structure, as well as map resolution, allows for collision queries, as needed for robot motion planning, at unprecedented speed. We quantitatively evaluate mapping accuracy, memory, runtime performance, and planning performance showing improvements over the state of the art, particularly in cases requiring high resolution maps.
Elastic and Efficient LiDAR Reconstruction for Large-Scale Exploration Tasks
Oct 19, 2020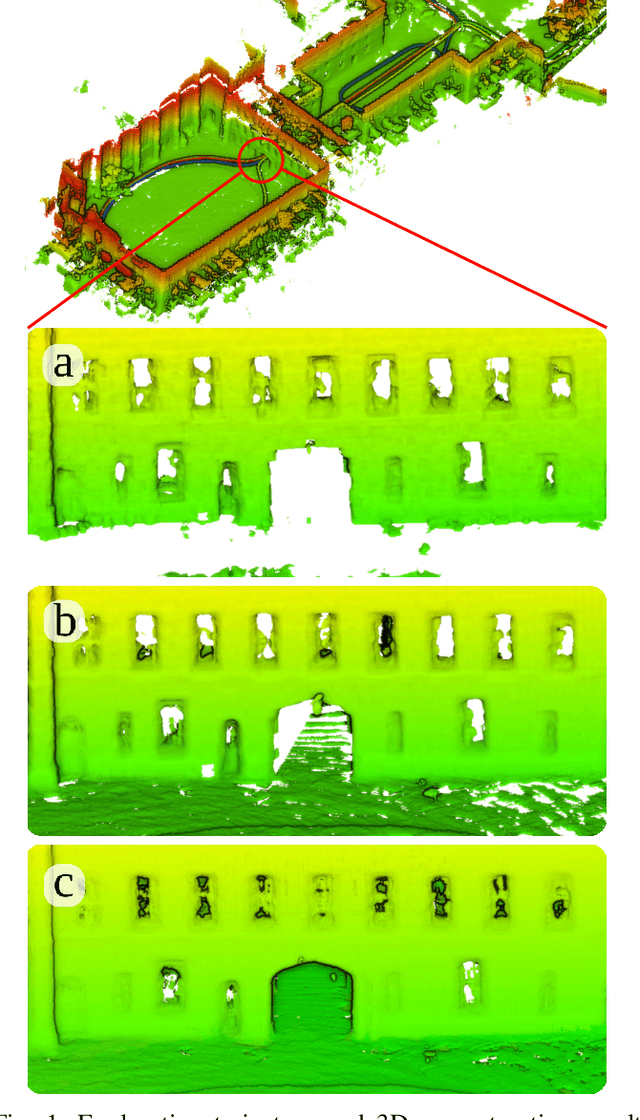
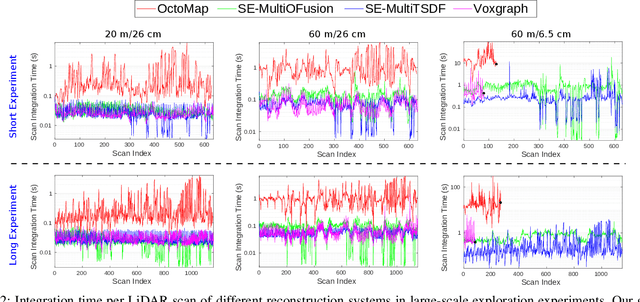
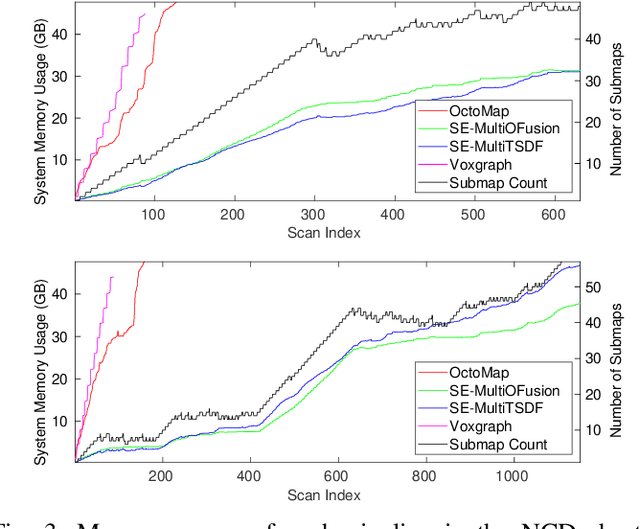
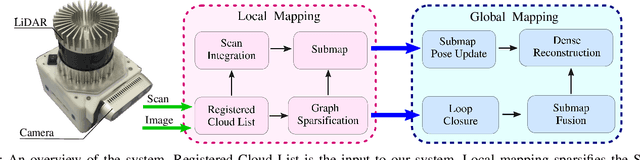
We present an efficient, elastic 3D LiDAR reconstruction framework which can reconstruct up to maximum LiDAR ranges (60 m) at multiple frames per second, thus enabling robot exploration in large-scale environments. Our approach only requires a CPU. We focus on three main challenges of large-scale reconstruction: integration of long-range LiDAR scans at high frequency, the capacity to deform the reconstruction after loop closures are detected, and scalability for long-duration exploration. Our system extends upon a state-of-the-art efficient RGB-D volumetric reconstruction technique, called supereight, to support LiDAR scans and a newly developed submapping technique to allow for dynamic correction of the 3D reconstruction. We then introduce a novel pose graph sparsification and submap fusion feature to make our system more scalable for large environments. We evaluate the performance using a published dataset captured by a handheld mapping device scanning a set of buildings, and with a mobile robot exploring an underground room network. Experimental results demonstrate that our system can reconstruct at 3 Hz with 60 m sensor range and ~5 cm resolution, while state-of-the-art approaches can only reconstruct to 25 cm resolution or 20 m range at the same frequency.
Fast Frontier-based Information-driven Autonomous Exploration with an MAV
Feb 13, 2020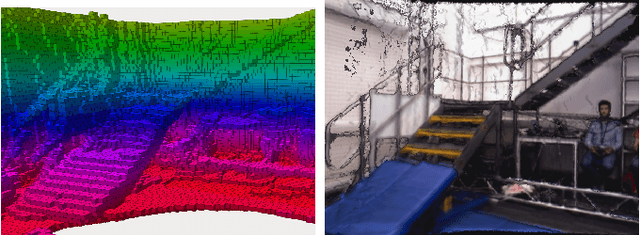
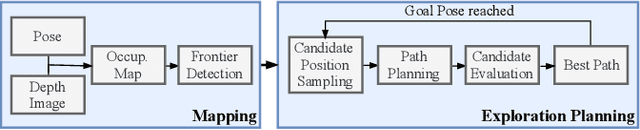
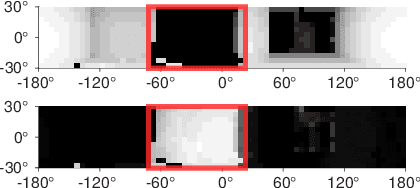
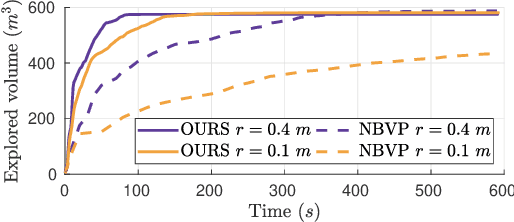
Exploration and collision-free navigation through an unknown environment is a fundamental task for autonomous robots. In this paper, a novel exploration strategy for Micro Aerial Vehicles (MAVs) is presented. The goal of the exploration strategy is the reduction of map entropy regarding occupancy probabilities, which is reflected in a utility function to be maximised. We achieve fast and efficient exploration performance with tight integration between our octree-based occupancy mapping approach, frontier extraction, and motion planning-as a hybrid between frontier-based and sampling-based exploration methods. The computationally expensive frontier clustering employed in classic frontier-based exploration is avoided by exploiting the implicit grouping of frontier voxels in the underlying octree map representation. Candidate next-views are sampled from the map frontiers and are evaluated using a utility function combining map entropy and travel time, where the former is computed efficiently using sparse raycasting. These optimisations along with the targeted exploration of frontier-based methods result in a fast and computationally efficient exploration planner. The proposed method is evaluated using both simulated and real-world experiments, demonstrating clear advantages over state-of-the-art approaches.