 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElastic and Efficient LiDAR Reconstruction for Large-Scale Exploration Tasks
Paper and Code
Oct 19, 2020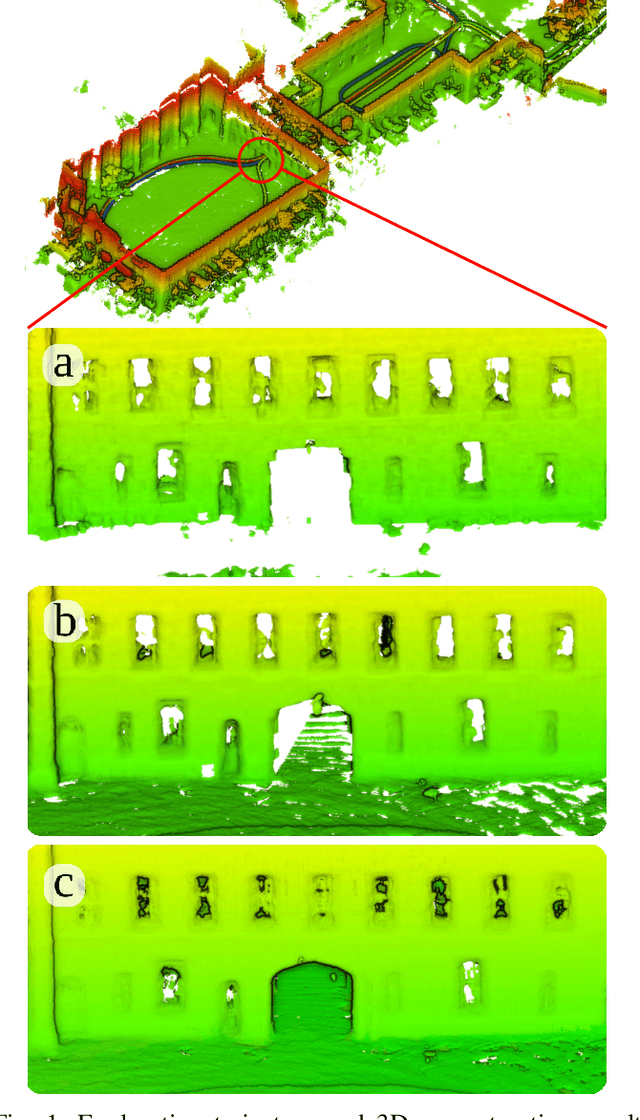
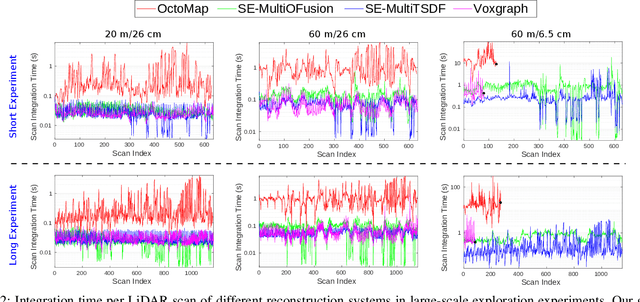
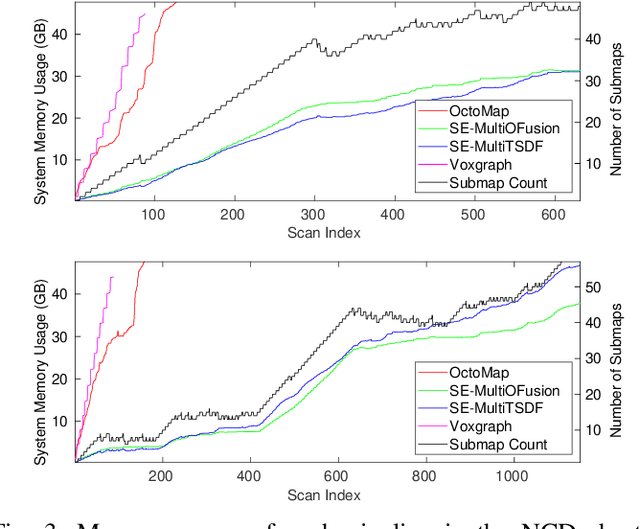
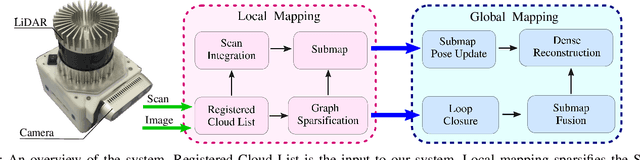
We present an efficient, elastic 3D LiDAR reconstruction framework which can reconstruct up to maximum LiDAR ranges (60 m) at multiple frames per second, thus enabling robot exploration in large-scale environments. Our approach only requires a CPU. We focus on three main challenges of large-scale reconstruction: integration of long-range LiDAR scans at high frequency, the capacity to deform the reconstruction after loop closures are detected, and scalability for long-duration exploration. Our system extends upon a state-of-the-art efficient RGB-D volumetric reconstruction technique, called supereight, to support LiDAR scans and a newly developed submapping technique to allow for dynamic correction of the 3D reconstruction. We then introduce a novel pose graph sparsification and submap fusion feature to make our system more scalable for large environments. We evaluate the performance using a published dataset captured by a handheld mapping device scanning a set of buildings, and with a mobile robot exploring an underground room network. Experimental results demonstrate that our system can reconstruct at 3 Hz with 60 m sensor range and ~5 cm resolution, while state-of-the-art approaches can only reconstruct to 25 cm resolution or 20 m range at the same frequency.