 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLatent Field Discovery In Interacting Dynamical Systems With Neural Fields
Oct 31, 2023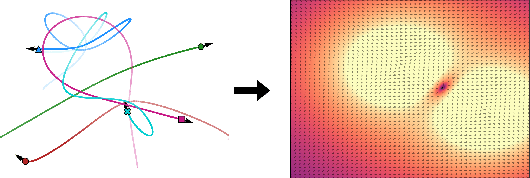
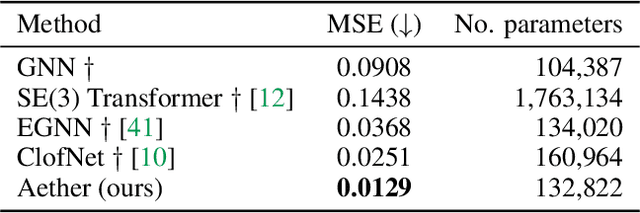
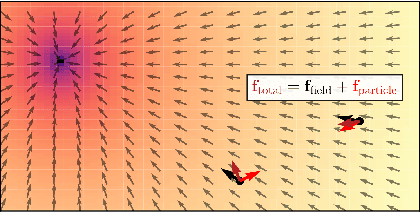

Systems of interacting objects often evolve under the influence of field effects that govern their dynamics, yet previous works have abstracted away from such effects, and assume that systems evolve in a vacuum. In this work, we focus on discovering these fields, and infer them from the observed dynamics alone, without directly observing them. We theorize the presence of latent force fields, and propose neural fields to learn them. Since the observed dynamics constitute the net effect of local object interactions and global field effects, recently popularized equivariant networks are inapplicable, as they fail to capture global information. To address this, we propose to disentangle local object interactions -- which are $\mathrm{SE}(n)$ equivariant and depend on relative states -- from external global field effects -- which depend on absolute states. We model interactions with equivariant graph networks, and combine them with neural fields in a novel graph network that integrates field forces. Our experiments show that we can accurately discover the underlying fields in charged particles settings, traffic scenes, and gravitational n-body problems, and effectively use them to learn the system and forecast future trajectories.
Roto-translated Local Coordinate Frames For Interacting Dynamical Systems
Oct 28, 2021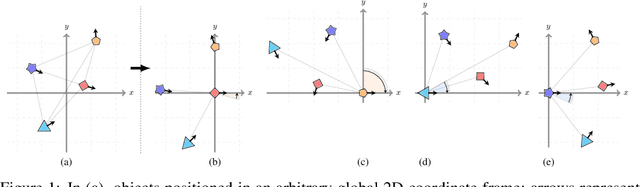
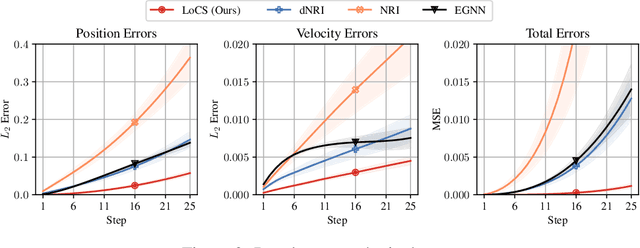
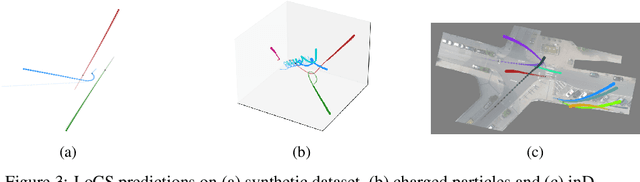
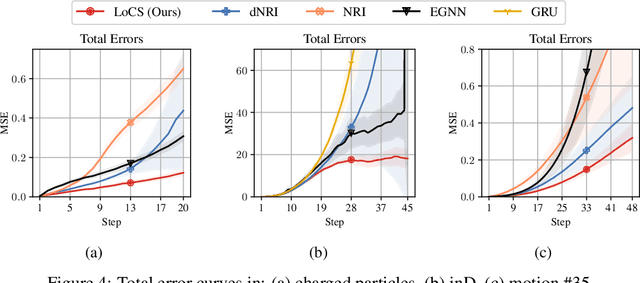
Modelling interactions is critical in learning complex dynamical systems, namely systems of interacting objects with highly non-linear and time-dependent behaviour. A large class of such systems can be formalized as $\textit{geometric graphs}$, $\textit{i.e.}$, graphs with nodes positioned in the Euclidean space given an $\textit{arbitrarily}$ chosen global coordinate system, for instance vehicles in a traffic scene. Notwithstanding the arbitrary global coordinate system, the governing dynamics of the respective dynamical systems are invariant to rotations and translations, also known as $\textit{Galilean invariance}$. As ignoring these invariances leads to worse generalization, in this work we propose local coordinate frames per node-object to induce roto-translation invariance to the geometric graph of the interacting dynamical system. Further, the local coordinate frames allow for a natural definition of anisotropic filtering in graph neural networks. Experiments in traffic scenes, 3D motion capture, and colliding particles demonstrate that the proposed approach comfortably outperforms the recent state-of-the-art.
BreakingBED -- Breaking Binary and Efficient Deep Neural Networks by Adversarial Attacks
Mar 14, 2021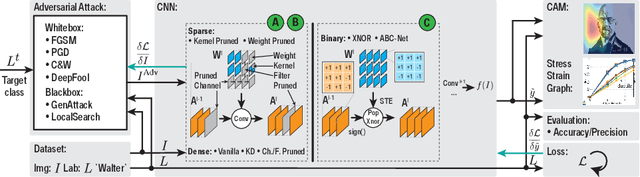
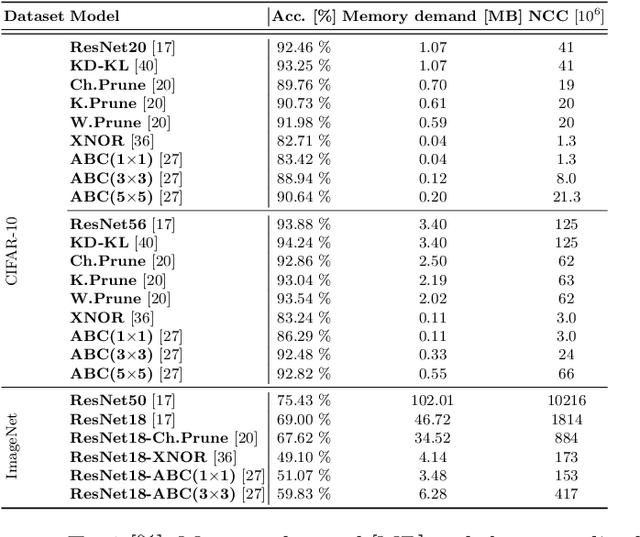
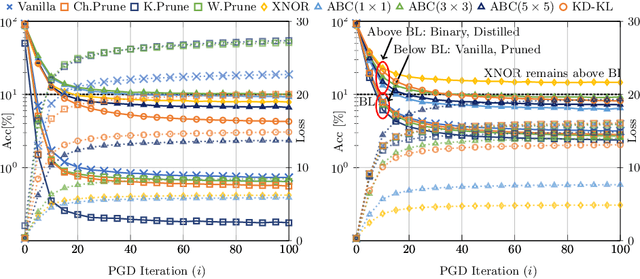
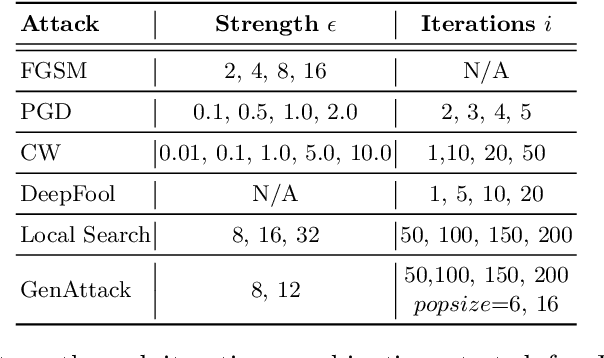
Deploying convolutional neural networks (CNNs) for embedded applications presents many challenges in balancing resource-efficiency and task-related accuracy. These two aspects have been well-researched in the field of CNN compression. In real-world applications, a third important aspect comes into play, namely the robustness of the CNN. In this paper, we thoroughly study the robustness of uncompressed, distilled, pruned and binarized neural networks against white-box and black-box adversarial attacks (FGSM, PGD, C&W, DeepFool, LocalSearch and GenAttack). These new insights facilitate defensive training schemes or reactive filtering methods, where the attack is detected and the input is discarded and/or cleaned. Experimental results are shown for distilled CNNs, agent-based state-of-the-art pruned models, and binarized neural networks (BNNs) such as XNOR-Net and ABC-Net, trained on CIFAR-10 and ImageNet datasets. We present evaluation methods to simplify the comparison between CNNs under different attack schemes using loss/accuracy levels, stress-strain graphs, box-plots and class activation mapping (CAM). Our analysis reveals susceptible behavior of uncompressed and pruned CNNs against all kinds of attacks. The distilled models exhibit their strength against all white box attacks with an exception of C&W. Furthermore, binary neural networks exhibit resilient behavior compared to their baselines and other compressed variants.
Binary DAD-Net: Binarized Driveable Area Detection Network for Autonomous Driving
Jun 15, 2020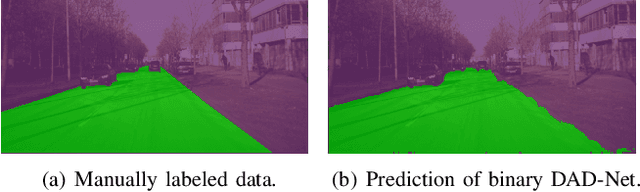
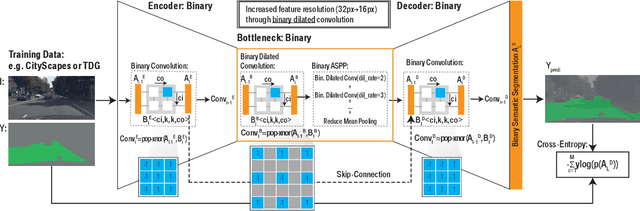
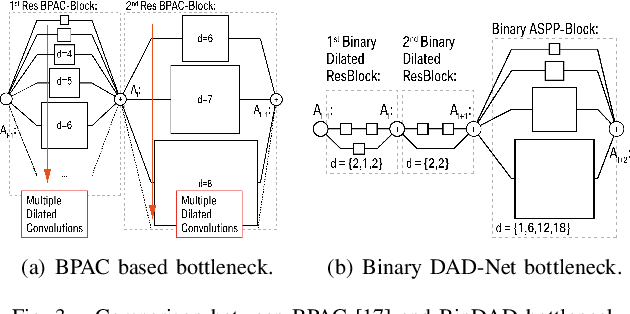
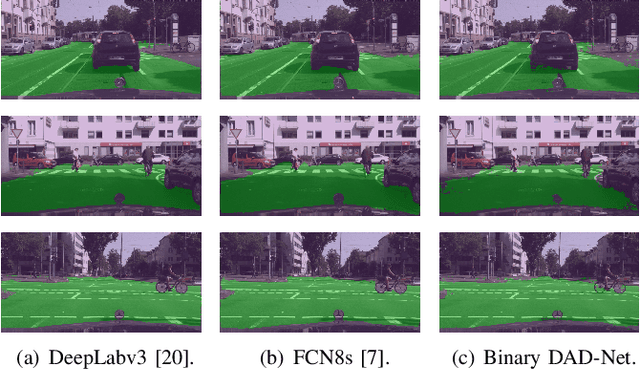
Driveable area detection is a key component for various applications in the field of autonomous driving (AD), such as ground-plane detection, obstacle detection and maneuver planning. Additionally, bulky and over-parameterized networks can be easily forgone and replaced with smaller networks for faster inference on embedded systems. The driveable area detection, posed as a two class segmentation task, can be efficiently modeled with slim binary networks. This paper proposes a novel binarized driveable area detection network (binary DAD-Net), which uses only binary weights and activations in the encoder, the bottleneck, and the decoder part. The latent space of the bottleneck is efficiently increased (x32 -> x16 downsampling) through binary dilated convolutions, learning more complex features. Along with automatically generated training data, the binary DAD-Net outperforms state-of-the-art semantic segmentation networks on public datasets. In comparison to a full-precision model, our approach has a x14.3 reduced compute complexity on an FPGA and it requires only 0.9MB memory resources. Therefore, commodity SIMD-based AD-hardware is capable of accelerating the binary DAD-Net.
SafeCritic: Collision-Aware Trajectory Prediction
Oct 15, 2019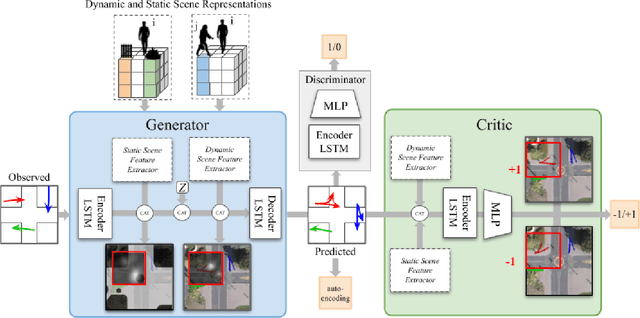



Navigating complex urban environments safely is a key to realize fully autonomous systems. Predicting future locations of vulnerable road users, such as pedestrians and cyclists, thus, has received a lot of attention in the recent years. While previous works have addressed modeling interactions with the static (obstacles) and dynamic (humans) environment agents, we address an important gap in trajectory prediction. We propose SafeCritic, a model that synergizes generative adversarial networks for generating multiple "real" trajectories with reinforcement learning to generate "safe" trajectories. The Discriminator evaluates the generated candidates on whether they are consistent with the observed inputs. The Critic network is environmentally aware to prune trajectories that are in collision or are in violation with the environment. The auto-encoding loss stabilizes training and prevents mode-collapse. We demonstrate results on two large scale data sets with a considerable improvement over state-of-the-art. We also show that the Critic is able to classify the safety of trajectories.
Attention-based Lane Change Prediction
Mar 07, 2019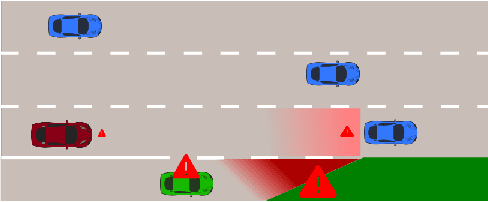

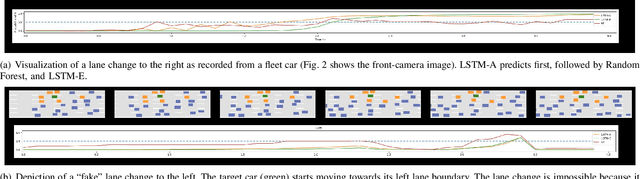
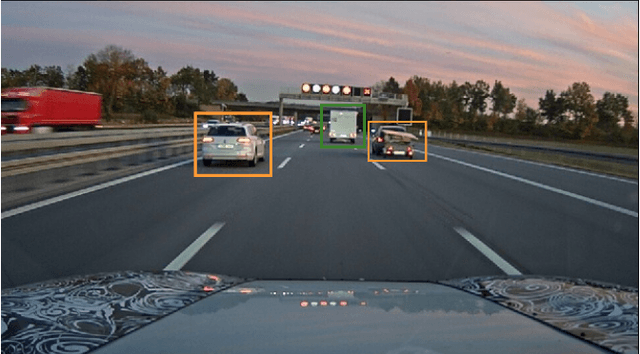
Lane change prediction of surrounding vehicles is a key building block of path planning. The focus has been on increasing the accuracy of prediction by posing it purely as a function estimation problem at the cost of model understandability. However, the efficacy of any lane change prediction model can be improved when both corner and failure cases are humanly understandable. We propose an attention-based recurrent model to tackle both understandability and prediction quality. We also propose metrics which reflect the discomfort felt by the driver. We show encouraging results on a publicly available dataset and proprietary fleet data.