 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplicit Domain Adaptation with Loosely Coupled Samples
Apr 24, 2020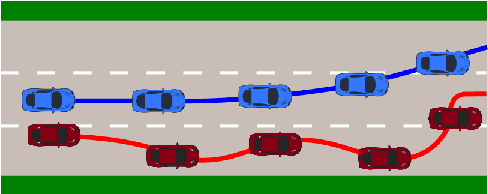
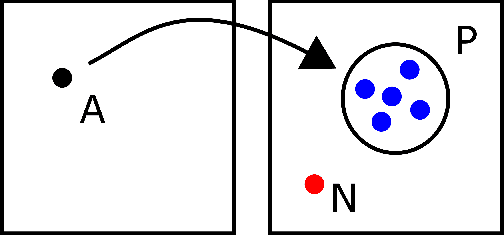
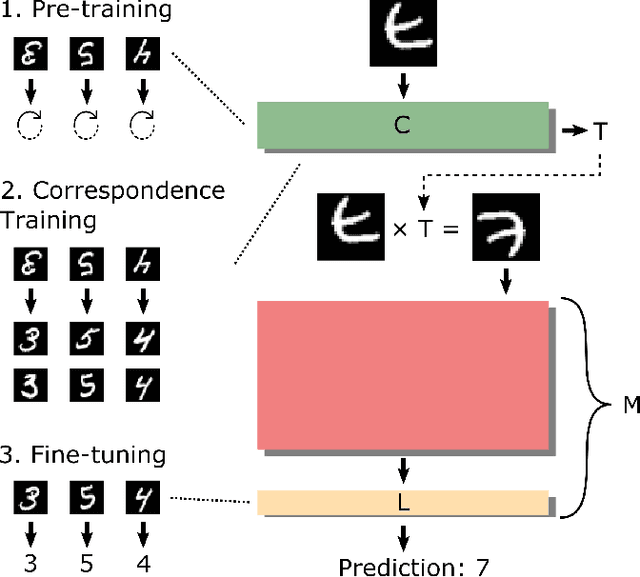
Transfer learning is an important field of machine learning in general, and particularly in the context of fully autonomous driving, which needs to be solved simultaneously for many different domains, such as changing weather conditions and country-specific driving behaviors. Traditional transfer learning methods often focus on image data and are black-box models. In this work we propose a transfer learning framework, core of which is learning an explicit mapping between domains. Due to its interpretability, this is beneficial for safety-critical applications, like autonomous driving. We show its general applicability by considering image classification problems and then move on to time-series data, particularly predicting lane changes. In our evaluation we adapt a pre-trained model to a dataset exhibiting different driving and sensory characteristics.
Attention-based Lane Change Prediction
Mar 07, 2019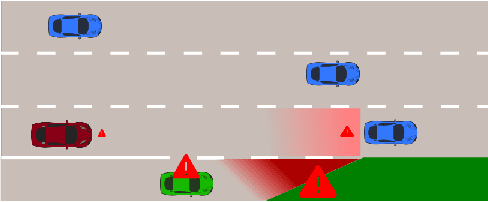

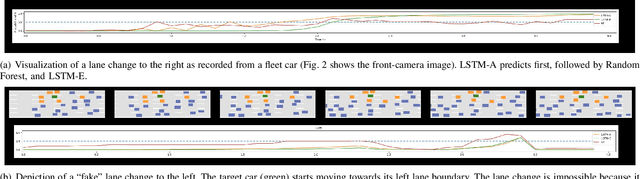
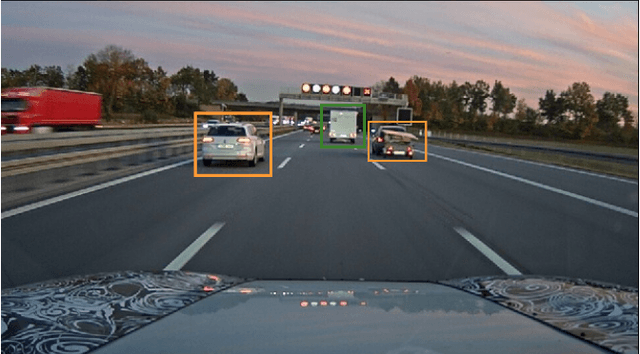
Lane change prediction of surrounding vehicles is a key building block of path planning. The focus has been on increasing the accuracy of prediction by posing it purely as a function estimation problem at the cost of model understandability. However, the efficacy of any lane change prediction model can be improved when both corner and failure cases are humanly understandable. We propose an attention-based recurrent model to tackle both understandability and prediction quality. We also propose metrics which reflect the discomfort felt by the driver. We show encouraging results on a publicly available dataset and proprietary fleet data.
Situation Assessment for Planning Lane Changes: Combining Recurrent Models and Prediction
May 17, 2018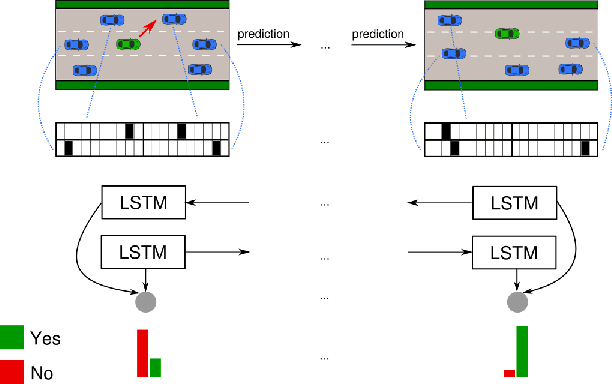

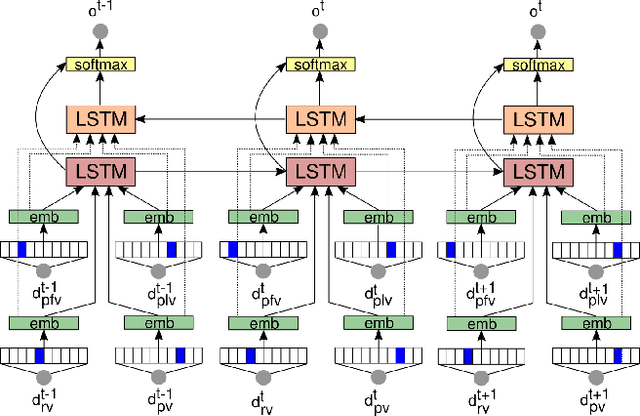
One of the greatest challenges towards fully autonomous cars is the understanding of complex and dynamic scenes. Such understanding is needed for planning of maneuvers, especially those that are particularly frequent such as lane changes. While in recent years advanced driver-assistance systems have made driving safer and more comfortable, these have mostly focused on car following scenarios, and less on maneuvers involving lane changes. In this work we propose a situation assessment algorithm for classifying driving situations with respect to their suitability for lane changing. For this, we propose a deep learning architecture based on a Bidirectional Recurrent Neural Network, which uses Long Short-Term Memory units, and integrates a prediction component in the form of the Intelligent Driver Model. We prove the feasibility of our algorithm on the publicly available NGSIM datasets, where we outperform existing methods.