 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSituation Assessment for Planning Lane Changes: Combining Recurrent Models and Prediction
Paper and Code
May 17, 2018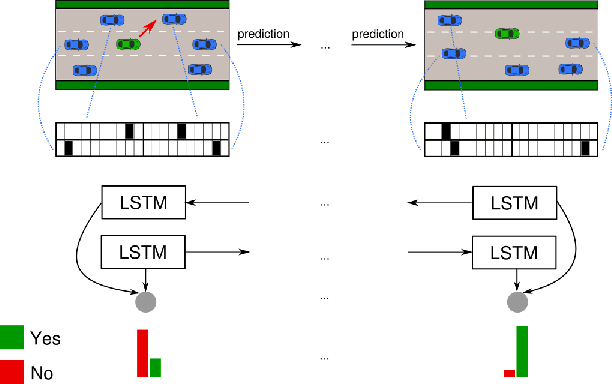

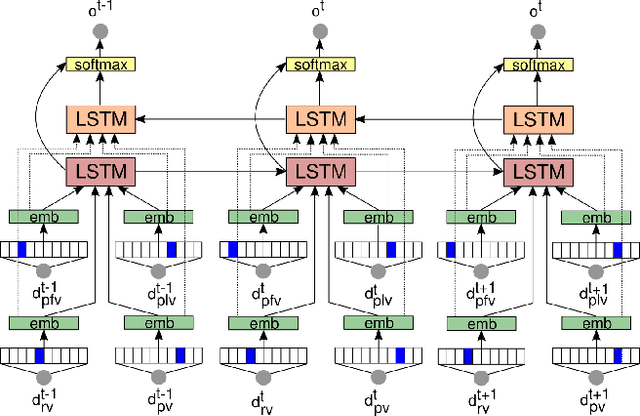
One of the greatest challenges towards fully autonomous cars is the understanding of complex and dynamic scenes. Such understanding is needed for planning of maneuvers, especially those that are particularly frequent such as lane changes. While in recent years advanced driver-assistance systems have made driving safer and more comfortable, these have mostly focused on car following scenarios, and less on maneuvers involving lane changes. In this work we propose a situation assessment algorithm for classifying driving situations with respect to their suitability for lane changing. For this, we propose a deep learning architecture based on a Bidirectional Recurrent Neural Network, which uses Long Short-Term Memory units, and integrates a prediction component in the form of the Intelligent Driver Model. We prove the feasibility of our algorithm on the publicly available NGSIM datasets, where we outperform existing methods.