 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafeCritic: Collision-Aware Trajectory Prediction
Paper and Code
Oct 15, 2019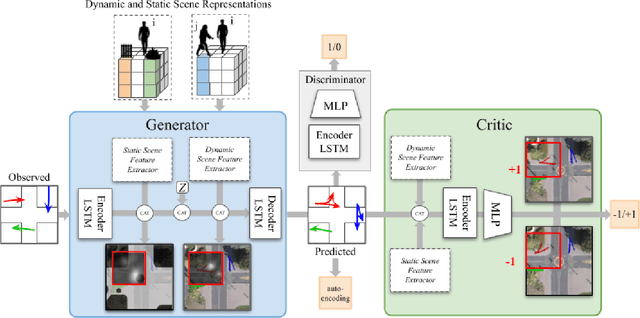



Navigating complex urban environments safely is a key to realize fully autonomous systems. Predicting future locations of vulnerable road users, such as pedestrians and cyclists, thus, has received a lot of attention in the recent years. While previous works have addressed modeling interactions with the static (obstacles) and dynamic (humans) environment agents, we address an important gap in trajectory prediction. We propose SafeCritic, a model that synergizes generative adversarial networks for generating multiple "real" trajectories with reinforcement learning to generate "safe" trajectories. The Discriminator evaluates the generated candidates on whether they are consistent with the observed inputs. The Critic network is environmentally aware to prune trajectories that are in collision or are in violation with the environment. The auto-encoding loss stabilizes training and prevents mode-collapse. We demonstrate results on two large scale data sets with a considerable improvement over state-of-the-art. We also show that the Critic is able to classify the safety of trajectories.