 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Exploration with Diffusion Policies in Hybrid Off-Policy RL: Application to Non-Prehensile Manipulation
Nov 22, 2024



Learning diverse policies for non-prehensile manipulation is essential for improving skill transfer and generalization to out-of-distribution scenarios. In this work, we enhance exploration through a two-fold approach within a hybrid framework that tackles both discrete and continuous action spaces. First, we model the continuous motion parameter policy as a diffusion model, and second, we incorporate this into a maximum entropy reinforcement learning framework that unifies both the discrete and continuous components. The discrete action space, such as contact point selection, is optimized through Q-value function maximization, while the continuous part is guided by a diffusion-based policy. This hybrid approach leads to a principled objective, where the maximum entropy term is derived as a lower bound using structured variational inference. We propose the Hybrid Diffusion Policy algorithm (HyDo) and evaluate its performance on both simulation and zero-shot sim2real tasks. Our results show that HyDo encourages more diverse behavior policies, leading to significantly improved success rates across tasks - for example, increasing from 53% to 72% on a real-world 6D pose alignment task. Project page: https://leh2rng.github.io/hydo
Efficient End-to-End Detection of 6-DoF Grasps for Robotic Bin Picking
May 10, 2024



Bin picking is an important building block for many robotic systems, in logistics, production or in household use-cases. In recent years, machine learning methods for the prediction of 6-DoF grasps on diverse and unknown objects have shown promising progress. However, existing approaches only consider a single ground truth grasp orientation at a grasp location during training and therefore can only predict limited grasp orientations which leads to a reduced number of feasible grasps in bin picking with restricted reachability. In this paper, we propose a novel approach for learning dense and diverse 6-DoF grasps for parallel-jaw grippers in robotic bin picking. We introduce a parameterized grasp distribution model based on Power-Spherical distributions that enables a training based on all possible ground truth samples. Thereby, we also consider the grasp uncertainty enhancing the model's robustness to noisy inputs. As a result, given a single top-down view depth image, our model can generate diverse grasps with multiple collision-free grasp orientations. Experimental evaluations in simulation and on a real robotic bin picking setup demonstrate the model's ability to generalize across various object categories achieving an object clearing rate of around $90 \%$ in simulation and real-world experiments. We also outperform state of the art approaches. Moreover, the proposed approach exhibits its usability in real robot experiments without any refinement steps, even when only trained on a synthetic dataset, due to the probabilistic grasp distribution modeling.
Pseudo-Labeling and Contextual Curriculum Learning for Online Grasp Learning in Robotic Bin Picking
Mar 04, 2024



The prevailing grasp prediction methods predominantly rely on offline learning, overlooking the dynamic grasp learning that occurs during real-time adaptation to novel picking scenarios. These scenarios may involve previously unseen objects, variations in camera perspectives, and bin configurations, among other factors. In this paper, we introduce a novel approach, SSL-ConvSAC, that combines semi-supervised learning and reinforcement learning for online grasp learning. By treating pixels with reward feedback as labeled data and others as unlabeled, it efficiently exploits unlabeled data to enhance learning. In addition, we address the imbalance between labeled and unlabeled data by proposing a contextual curriculum-based method. We ablate the proposed approach on real-world evaluation data and demonstrate promise for improving online grasp learning on bin picking tasks using a physical 7-DoF Franka Emika robot arm with a suction gripper. Video: https://youtu.be/OAro5pg8I9U
Uncertainty-driven Exploration Strategies for Online Grasp Learning
Sep 21, 2023Existing grasp prediction approaches are mostly based on offline learning, while, ignored the exploratory grasp learning during online adaptation to new picking scenarios, i.e., unseen object portfolio, camera and bin settings etc. In this paper, we present a novel method for online learning of grasp predictions for robotic bin picking in a principled way. Existing grasp prediction approaches are mostly based on offline learning, while, ignored the exploratory grasp learning during online adaptation to new picking scenarios, i.e., unseen object portfolio, camera and bin settings etc. In this paper, we present a novel method for online learning of grasp predictions for robotic bin picking in a principled way. Specifically, the online learning algorithm with an effective exploration strategy can significantly improve its adaptation performance to unseen environment settings. To this end, we first propose to formulate online grasp learning as a RL problem that will allow to adapt both grasp reward prediction and grasp poses. We propose various uncertainty estimation schemes based on Bayesian Uncertainty Quantification and Distributional Ensembles. We carry out evaluations on real-world bin picking scenes of varying difficulty. The objects in the bin have various challenging physical and perceptual characteristics that can be characterized by semi- or total transparency, and irregular or curved surfaces. The results of our experiments demonstrate a notable improvement in the suggested approach compared to conventional online learning methods which incorporate only naive exploration strategies.
Model-free Grasping with Multi-Suction Cup Grippers for Robotic Bin Picking
Jul 31, 2023This paper presents a novel method for model-free prediction of grasp poses for suction grippers with multiple suction cups. Our approach is agnostic to the design of the gripper and does not require gripper-specific training data. In particular, we propose a two-step approach, where first, a neural network predicts pixel-wise grasp quality for an input image to indicate areas that are generally graspable. Second, an optimization step determines the optimal gripper selection and corresponding grasp poses based on configured gripper layouts and activation schemes. In addition, we introduce a method for automated labeling for supervised training of the grasp quality network. Experimental evaluations on a real-world industrial application with bin picking scenes of varying difficulty demonstrate the effectiveness of our method.
Learning Dense Visual Descriptors using Image Augmentations for Robot Manipulation Tasks
Sep 12, 2022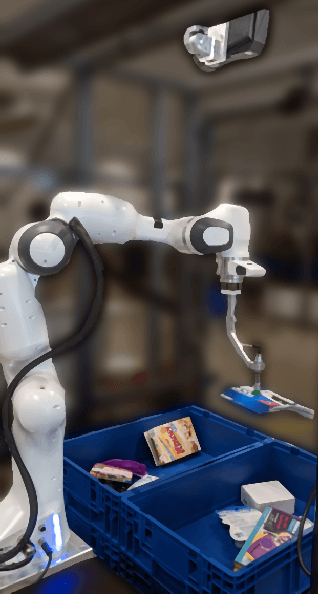

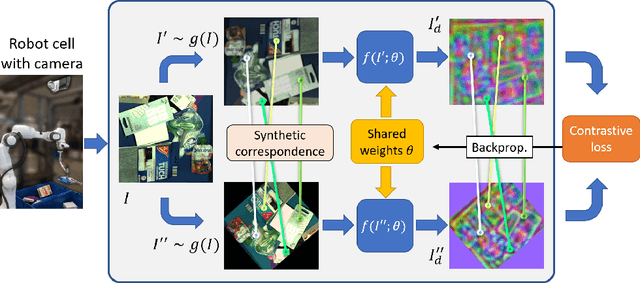
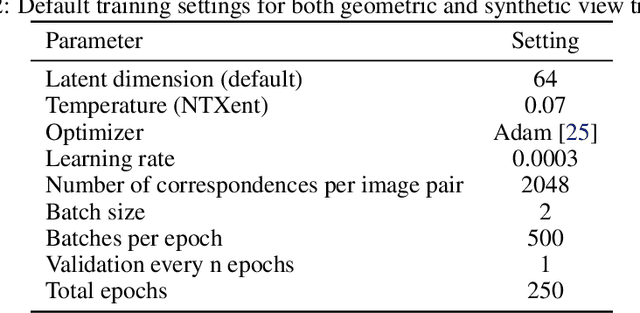
We propose a self-supervised training approach for learning view-invariant dense visual descriptors using image augmentations. Unlike existing works, which often require complex datasets, such as registered RGBD sequences, we train on an unordered set of RGB images. This allows for learning from a single camera view, e.g., in an existing robotic cell with a fix-mounted camera. We create synthetic views and dense pixel correspondences using data augmentations. We find our descriptors are competitive to the existing methods, despite the simpler data recording and setup requirements. We show that training on synthetic correspondences provides descriptor consistency across a broad range of camera views. We compare against training with geometric correspondence from multiple views and provide ablation studies. We also show a robotic bin-picking experiment using descriptors learned from a fix-mounted camera for defining grasp preferences.