 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Long-Range Interactions in Graph Neural Simulators via Hamiltonian Dynamics
Nov 11, 2025Learning to simulate complex physical systems from data has emerged as a promising way to overcome the limitations of traditional numerical solvers, which often require prohibitive computational costs for high-fidelity solutions. Recent Graph Neural Simulators (GNSs) accelerate simulations by learning dynamics on graph-structured data, yet often struggle to capture long-range interactions and suffer from error accumulation under autoregressive rollouts. To address these challenges, we propose Information-preserving Graph Neural Simulators (IGNS), a graph-based neural simulator built on the principles of Hamiltonian dynamics. This structure guarantees preservation of information across the graph, while extending to port-Hamiltonian systems allows the model to capture a broader class of dynamics, including non-conservative effects. IGNS further incorporates a warmup phase to initialize global context, geometric encoding to handle irregular meshes, and a multi-step training objective to reduce rollout error. To evaluate these properties systematically, we introduce new benchmarks that target long-range dependencies and challenging external forcing scenarios. Across all tasks, IGNS consistently outperforms state-of-the-art GNSs, achieving higher accuracy and stability under challenging and complex dynamical systems.
Context-aware Learned Mesh-based Simulation via Trajectory-Level Meta-Learning
Nov 07, 2025Simulating object deformations is a critical challenge across many scientific domains, including robotics, manufacturing, and structural mechanics. Learned Graph Network Simulators (GNSs) offer a promising alternative to traditional mesh-based physics simulators. Their speed and inherent differentiability make them particularly well suited for applications that require fast and accurate simulations, such as robotic manipulation or manufacturing optimization. However, existing learned simulators typically rely on single-step observations, which limits their ability to exploit temporal context. Without this information, these models fail to infer, e.g., material properties. Further, they rely on auto-regressive rollouts, which quickly accumulate error for long trajectories. We instead frame mesh-based simulation as a trajectory-level meta-learning problem. Using Conditional Neural Processes, our method enables rapid adaptation to new simulation scenarios from limited initial data while capturing their latent simulation properties. We utilize movement primitives to directly predict fast, stable and accurate simulations from a single model call. The resulting approach, Movement-primitive Meta-MeshGraphNet (M3GN), provides higher simulation accuracy at a fraction of the runtime cost compared to state-of-the-art GNSs across several tasks.
AMBER: Adaptive Mesh Generation by Iterative Mesh Resolution Prediction
May 29, 2025The cost and accuracy of simulating complex physical systems using the Finite Element Method (FEM) scales with the resolution of the underlying mesh. Adaptive meshes improve computational efficiency by refining resolution in critical regions, but typically require task-specific heuristics or cumbersome manual design by a human expert. We propose Adaptive Meshing By Expert Reconstruction (AMBER), a supervised learning approach to mesh adaptation. Starting from a coarse mesh, AMBER iteratively predicts the sizing field, i.e., a function mapping from the geometry to the local element size of the target mesh, and uses this prediction to produce a new intermediate mesh using an out-of-the-box mesh generator. This process is enabled through a hierarchical graph neural network, and relies on data augmentation by automatically projecting expert labels onto AMBER-generated data during training. We evaluate AMBER on 2D and 3D datasets, including classical physics problems, mechanical components, and real-world industrial designs with human expert meshes. AMBER generalizes to unseen geometries and consistently outperforms multiple recent baselines, including ones using Graph and Convolutional Neural Networks, and Reinforcement Learning-based approaches.
Geometry-aware RL for Manipulation of Varying Shapes and Deformable Objects
Feb 12, 2025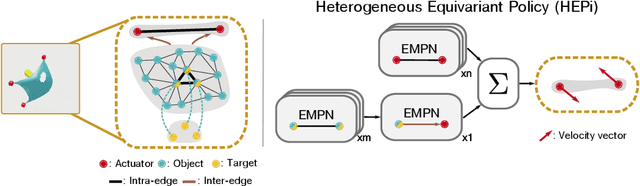
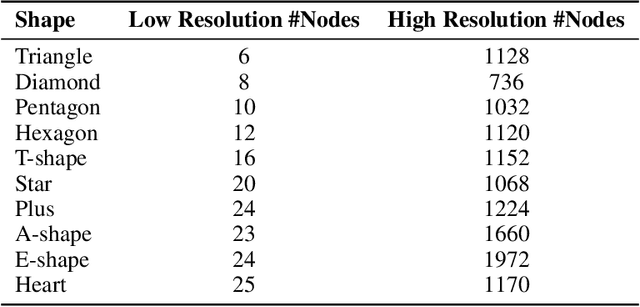
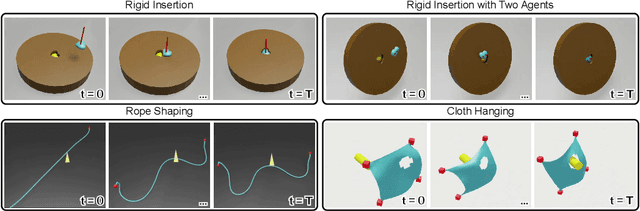
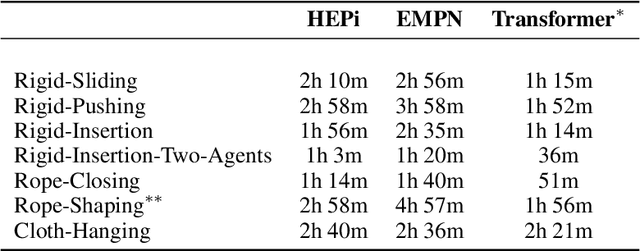
Manipulating objects with varying geometries and deformable objects is a major challenge in robotics. Tasks such as insertion with different objects or cloth hanging require precise control and effective modelling of complex dynamics. In this work, we frame this problem through the lens of a heterogeneous graph that comprises smaller sub-graphs, such as actuators and objects, accompanied by different edge types describing their interactions. This graph representation serves as a unified structure for both rigid and deformable objects tasks, and can be extended further to tasks comprising multiple actuators. To evaluate this setup, we present a novel and challenging reinforcement learning benchmark, including rigid insertion of diverse objects, as well as rope and cloth manipulation with multiple end-effectors. These tasks present a large search space, as both the initial and target configurations are uniformly sampled in 3D space. To address this issue, we propose a novel graph-based policy model, dubbed Heterogeneous Equivariant Policy (HEPi), utilizing $SE(3)$ equivariant message passing networks as the main backbone to exploit the geometric symmetry. In addition, by modeling explicit heterogeneity, HEPi can outperform Transformer-based and non-heterogeneous equivariant policies in terms of average returns, sample efficiency, and generalization to unseen objects.
Enhancing Exploration with Diffusion Policies in Hybrid Off-Policy RL: Application to Non-Prehensile Manipulation
Nov 22, 2024



Learning diverse policies for non-prehensile manipulation is essential for improving skill transfer and generalization to out-of-distribution scenarios. In this work, we enhance exploration through a two-fold approach within a hybrid framework that tackles both discrete and continuous action spaces. First, we model the continuous motion parameter policy as a diffusion model, and second, we incorporate this into a maximum entropy reinforcement learning framework that unifies both the discrete and continuous components. The discrete action space, such as contact point selection, is optimized through Q-value function maximization, while the continuous part is guided by a diffusion-based policy. This hybrid approach leads to a principled objective, where the maximum entropy term is derived as a lower bound using structured variational inference. We propose the Hybrid Diffusion Policy algorithm (HyDo) and evaluate its performance on both simulation and zero-shot sim2real tasks. Our results show that HyDo encourages more diverse behavior policies, leading to significantly improved success rates across tasks - for example, increasing from 53% to 72% on a real-world 6D pose alignment task. Project page: https://leh2rng.github.io/hydo
Latent Task-Specific Graph Network Simulators
Nov 09, 2023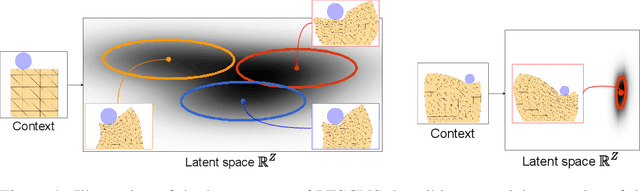
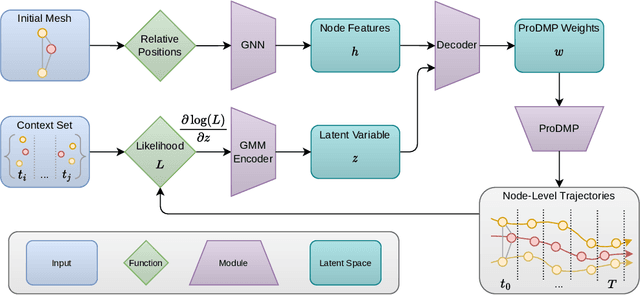
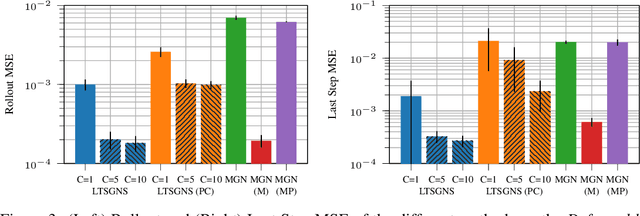
Simulating dynamic physical interactions is a critical challenge across multiple scientific domains, with applications ranging from robotics to material science. For mesh-based simulations, Graph Network Simulators (GNSs) pose an efficient alternative to traditional physics-based simulators. Their inherent differentiability and speed make them particularly well-suited for inverse design problems. Yet, adapting to new tasks from limited available data is an important aspect for real-world applications that current methods struggle with. We frame mesh-based simulation as a meta-learning problem and use a recent Bayesian meta-learning method to improve GNSs adaptability to new scenarios by leveraging context data and handling uncertainties. Our approach, latent task-specific graph network simulator, uses non-amortized task posterior approximations to sample latent descriptions of unknown system properties. Additionally, we leverage movement primitives for efficient full trajectory prediction, effectively addressing the issue of accumulating errors encountered by previous auto-regressive methods. We validate the effectiveness of our approach through various experiments, performing on par with or better than established baseline methods. Movement primitives further allow us to accommodate various types of context data, as demonstrated through the utilization of point clouds during inference. By combining GNSs with meta-learning, we bring them closer to real-world applicability, particularly in scenarios with smaller datasets.
Ball-and-socket joint pose estimation using magnetic field
Oct 08, 2022
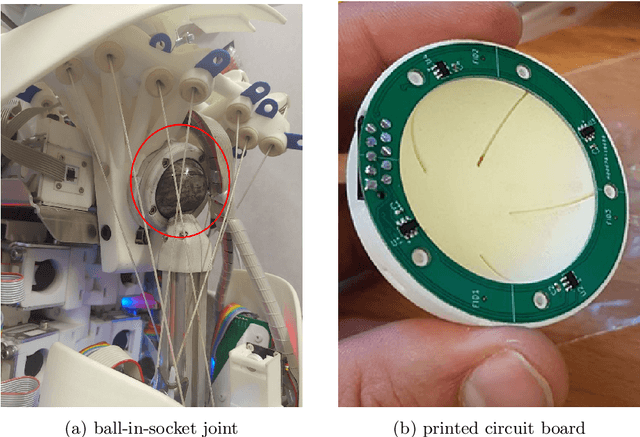
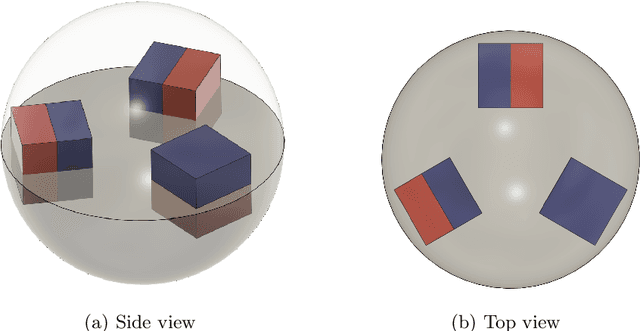
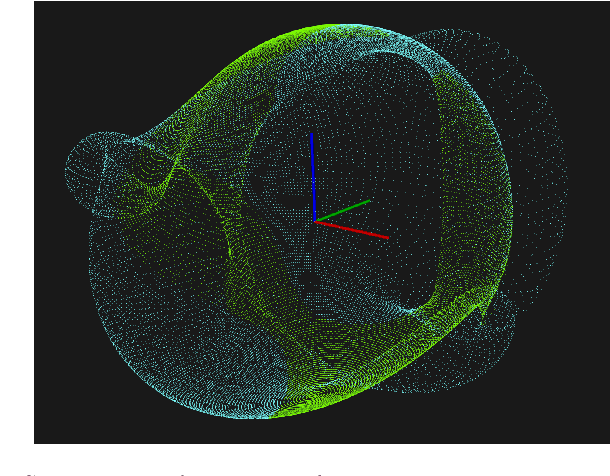
Roboy 3.0 is an open-source tendon-driven humanoid robot that mimics the musculoskeletal system of the human body. Roboy 3.0 is being developed as a remote robotic body - or a robotic avatar - for humans to achieve remote physical presence. Artificial muscles and tendons allow it to closely resemble human morphology with 3-DoF neck, shoulders and wrists. Roboy 3.0 3-DoF joints are implemented as ball-and-socket joints. While industry provides a clear solution for 1-DoF joint pose sensing, it is not the case for the ball-and-socket joint type. In this paper we present a custom solution to estimate the pose of a ball-and-socket joint. We embed an array of magnets into the ball and an array of 3D magnetic sensors into the socket. We then, based on the changes in the magnetic field as the joint rotates, are able to estimate the orientation of the joint. We evaluate the performance of two neural network approaches using the LSTM and Bayesian-filter like DVBF. Results show that in order to achieve the same mean square error (MSE) DVBFs require significantly more time training and hyperparameter tuning compared to LSTMs, while DVBF cope with sensor noise better. Both methods are capable of real-time joint pose estimation at 37 Hz with MSE of around 0.03 rad for all three degrees of freedom combined. The LSTM model is deployed and used for joint pose estimation of Roboy 3.0's shoulder and neck joints. The software implementation and PCB designs are open-sourced under https://github.com/Roboy/ball_and_socket_estimator
Bayes-Adaptive Deep Model-Based Policy Optimisation
Oct 29, 2020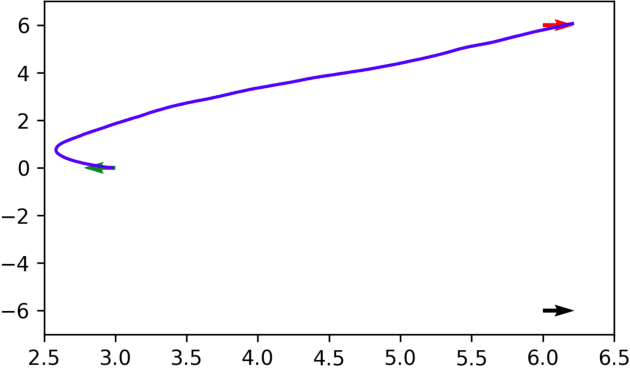
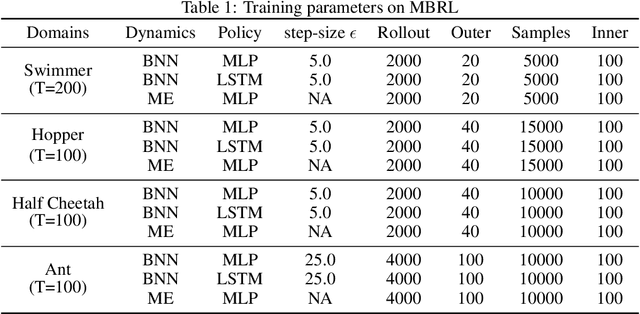
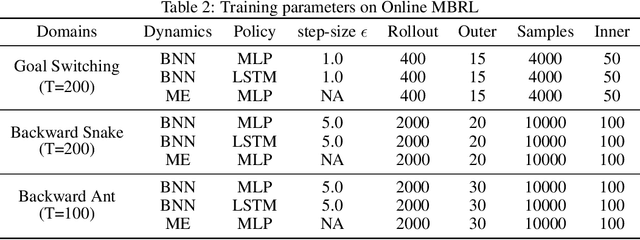
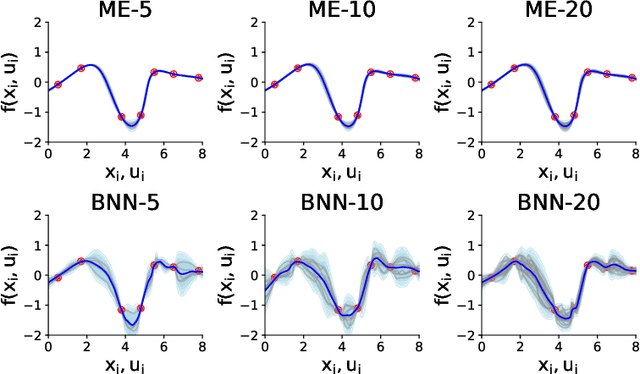
We introduce a Bayesian (deep) model-based reinforcement learning method (RoMBRL) that can capture model uncertainty to achieve sample-efficient policy optimisation. We propose to formulate the model-based policy optimisation problem as a Bayes-adaptive Markov decision process (BAMDP). RoMBRL maintains model uncertainty via belief distributions through a deep Bayesian neural network whose samples are generated via stochastic gradient Hamiltonian Monte Carlo. Uncertainty is propagated through simulations controlled by sampled models and history-based policies. As beliefs are encoded in visited histories, we propose a history-based policy network that can be end-to-end trained to generalise across history space and will be trained using recurrent Trust-Region Policy Optimisation. We show that RoMBRL outperforms existing approaches on many challenging control benchmark tasks in terms of sample complexity and task performance. The source code of this paper is also publicly available on https://github.com/thobotics/RoMBRL.
Towards Autoencoding Variational Inference for Aspect-based Opinion Summary
Feb 16, 2019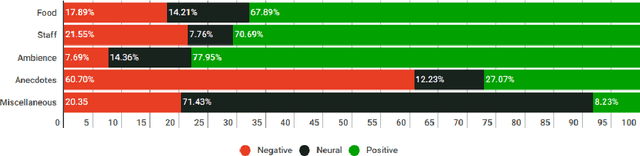
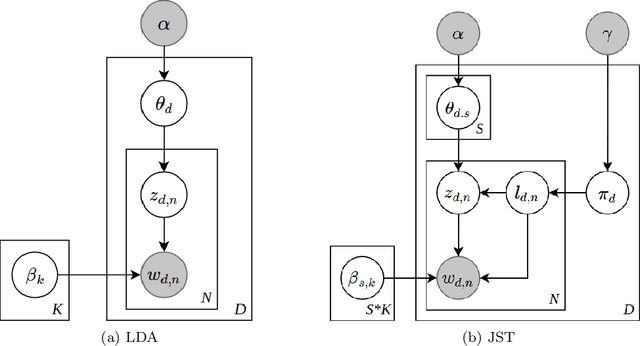
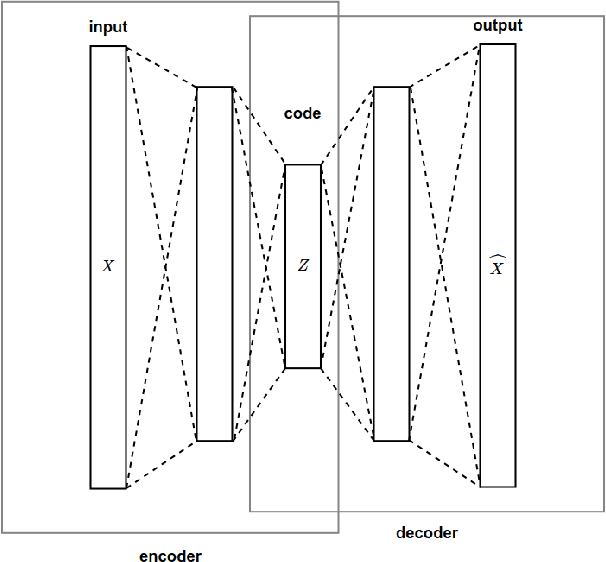

Aspect-based Opinion Summary (AOS), consisting of aspect discovery and sentiment classification steps, has recently been emerging as one of the most crucial data mining tasks in e-commerce systems. Along this direction, the LDA-based model is considered as a notably suitable approach, since this model offers both topic modeling and sentiment classification. However, unlike traditional topic modeling, in the context of aspect discovery it is often required some initial seed words, whose prior knowledge is not easy to be incorporated into LDA models. Moreover, LDA approaches rely on sampling methods, which need to load the whole corpus into memory, making them hardly scalable. In this research, we study an alternative approach for AOS problem, based on Autoencoding Variational Inference (AVI). Firstly, we introduce the Autoencoding Variational Inference for Aspect Discovery (AVIAD) model, which extends the previous work of Autoencoding Variational Inference for Topic Models (AVITM) to embed prior knowledge of seed words. This work includes enhancement of the previous AVI architecture and also modification of the loss function. Ultimately, we present the Autoencoding Variational Inference for Joint Sentiment/Topic (AVIJST) model. In this model, we substantially extend the AVI model to support the JST model, which performs topic modeling for corresponding sentiment. The experimental results show that our proposed models enjoy higher topic coherent, faster convergence time and better accuracy on sentiment classification, as compared to their LDA-based counterparts.