 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFARPLS: A Feature-Augmented Robot Trajectory Preference Labeling System to Assist Human Labelers' Preference Elicitation
Mar 10, 2024Preference-based learning aims to align robot task objectives with human values. One of the most common methods to infer human preferences is by pairwise comparisons of robot task trajectories. Traditional comparison-based preference labeling systems seldom support labelers to digest and identify critical differences between complex trajectories recorded in videos. Our formative study (N = 12) suggests that individuals may overlook non-salient task features and establish biased preference criteria during their preference elicitation process because of partial observations. In addition, they may experience mental fatigue when given many pairs to compare, causing their label quality to deteriorate. To mitigate these issues, we propose FARPLS, a Feature-Augmented Robot trajectory Preference Labeling System. FARPLS highlights potential outliers in a wide variety of task features that matter to humans and extracts the corresponding video keyframes for easy review and comparison. It also dynamically adjusts the labeling order according to users' familiarities, difficulties of the trajectory pair, and level of disagreements. At the same time, the system monitors labelers' consistency and provides feedback on labeling progress to keep labelers engaged. A between-subjects study (N = 42, 105 pairs of robot pick-and-place trajectories per person) shows that FARPLS can help users establish preference criteria more easily and notice more relevant details in the presented trajectories than the conventional interface. FARPLS also improves labeling consistency and engagement, mitigating challenges in preference elicitation without raising cognitive loads significantly
An Incremental Unified Framework for Small Defect Inspection
Dec 14, 2023

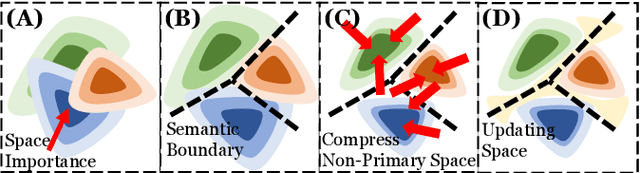
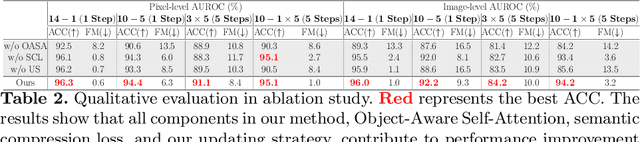
Artificial Intelligence (AI)-driven defect inspection is pivotal in industrial manufacturing. Yet, many methods, tailored to specific pipelines, grapple with diverse product portfolios and evolving processes. Addressing this, we present the Incremental Unified Framework (IUF) that can reduce the feature conflict problem when continuously integrating new objects in the pipeline, making it advantageous in object-incremental learning scenarios. Employing a state-of-the-art transformer, we introduce Object-Aware Self-Attention (OASA) to delineate distinct semantic boundaries. Semantic Compression Loss (SCL) is integrated to optimize non-primary semantic space, enhancing network adaptability for novel objects. Additionally, we prioritize retaining the features of established objects during weight updates. Demonstrating prowess in both image and pixel-level defect inspection, our approach achieves state-of-the-art performance, proving indispensable for dynamic and scalable industrial inspections. Our code will be released at https://github.com/jqtangust/IUF.
A Complementary Framework for Human-Robot Collaboration with a Mixed AR-Haptic Interface
Oct 12, 2022
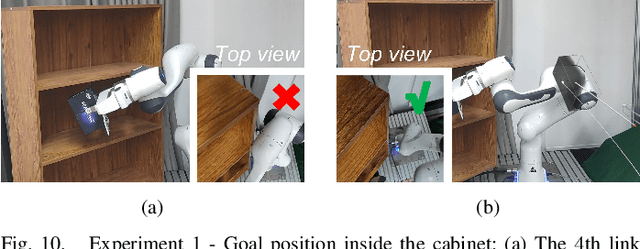
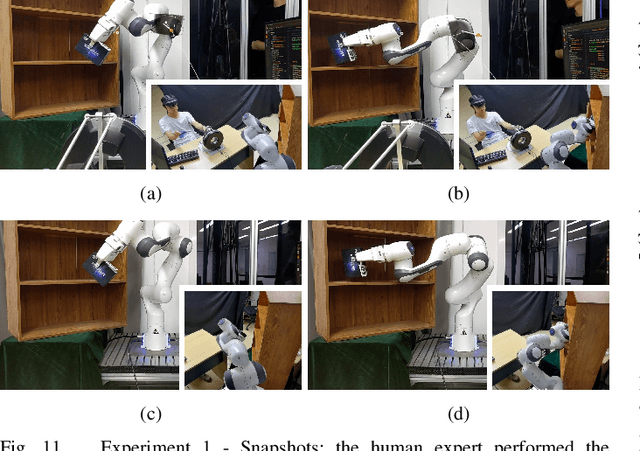
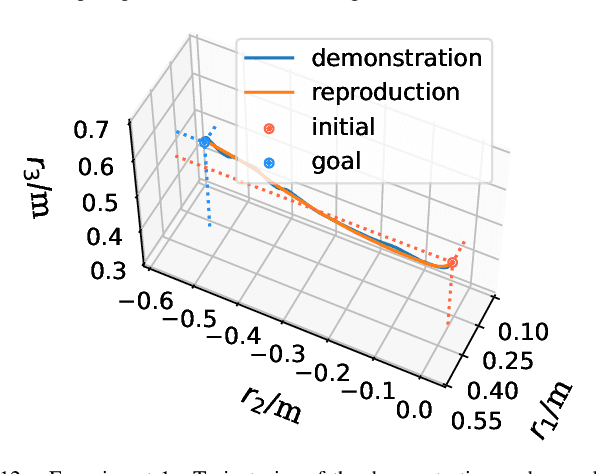
There is invariably a trade-off between safety and efficiency for collaborative robots (cobots) in human-robot collaborations. Robots that interact minimally with humans can work with high speed and accuracy but cannot adapt to new tasks or respond to unforeseen changes, whereas robots that work closely with humans can but only by becoming passive to humans, meaning that their main tasks suspended and efficiency compromised. Accordingly, this paper proposes a new complementary framework for human-robot collaboration that balances the safety of humans and the efficiency of robots. In this framework, the robot carries out given tasks using a vision-based adaptive controller, and the human expert collaborates with the robot in the null space. Such a decoupling drives the robot to deal with existing issues in task space (e.g., uncalibrated camera, limited field of view) and in null space (e.g., joint limits) by itself while allowing the expert to adjust the configuration of the robot body to respond to unforeseen changes (e.g., sudden invasion, change of environment) without affecting the robot's main task. Additionally, the robot can simultaneously learn the expert's demonstration in task space and null space beforehand with dynamic movement primitives (DMP). Therefore, an expert's knowledge and a robot's capability are both explored and complementary. Human demonstration and involvement are enabled via a mixed interaction interface, i.e., augmented reality (AR) and haptic devices. The stability of the closed-loop system is rigorously proved with Lyapunov methods. Experimental results in various scenarios are presented to illustrate the performance of the proposed method.