 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Vision-Based Control of Redundant Robots with Null-Space Interaction for Human-Robot Collaboration
Mar 09, 2026Human-robot collaboration aims to extend human ability through cooperation with robots. This technology is currently helping people with physical disabilities, has transformed the manufacturing process of companies, improved surgical performance, and will likely revolutionize the daily lives of everyone in the future. Being able to enhance the performance of both sides, such that human-robot collaboration outperforms a single robot/human, remains an open issue. For safer and more effective collaboration, a new control scheme has been proposed for redundant robots in this paper, consisting of an adaptive vision-based control term in task space and an interactive control term in null space. Such a formulation allows the robot to autonomously carry out tasks in an unknown environment without prior calibration while also interacting with humans to deal with unforeseen changes (e.g., potential collision, temporary needs) under the redundant configuration. The decoupling between task space and null space helps to explore the collaboration safely and effectively without affecting the main task of the robot end-effector. The stability of the closed-loop system has been rigorously proved with Lyapunov methods, and both the convergence of the position error in task space and that of the damping model in null space are guaranteed. The experimental results of a robot manipulator guided with the technology of augmented reality (AR) are presented to illustrate the performance of the control scheme.
UltraDP: Generalizable Carotid Ultrasound Scanning with Force-Aware Diffusion Policy
Nov 19, 2025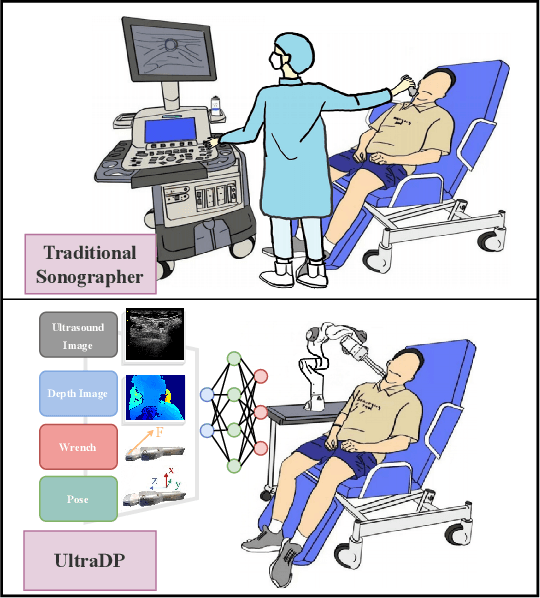
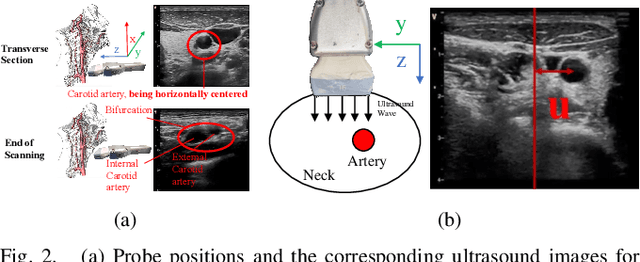
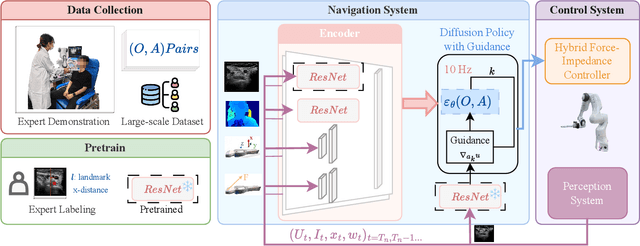
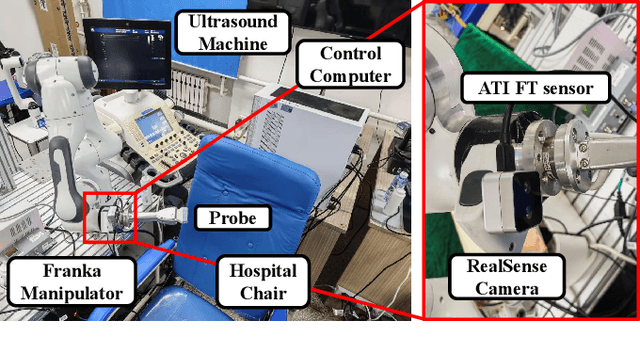
Ultrasound scanning is a critical imaging technique for real-time, non-invasive diagnostics. However, variations in patient anatomy and complex human-in-the-loop interactions pose significant challenges for autonomous robotic scanning. Existing ultrasound scanning robots are commonly limited to relatively low generalization and inefficient data utilization. To overcome these limitations, we present UltraDP, a Diffusion-Policy-based method that receives multi-sensory inputs (ultrasound images, wrist camera images, contact wrench, and probe pose) and generates actions that are fit for multi-modal action distributions in autonomous ultrasound scanning of carotid artery. We propose a specialized guidance module to enable the policy to output actions that center the artery in ultrasound images. To ensure stable contact and safe interaction between the robot and the human subject, a hybrid force-impedance controller is utilized to drive the robot to track such trajectories. Also, we have built a large-scale training dataset for carotid scanning comprising 210 scans with 460k sample pairs from 21 volunteers of both genders. By exploring our guidance module and DP's strong generalization ability, UltraDP achieves a 95% success rate in transverse scanning on previously unseen subjects, demonstrating its effectiveness.
UltraHiT: A Hierarchical Transformer Architecture for Generalizable Internal Carotid Artery Robotic Ultrasonography
Sep 17, 2025Carotid ultrasound is crucial for the assessment of cerebrovascular health, particularly the internal carotid artery (ICA). While previous research has explored automating carotid ultrasound, none has tackled the challenging ICA. This is primarily due to its deep location, tortuous course, and significant individual variations, which greatly increase scanning complexity. To address this, we propose a Hierarchical Transformer-based decision architecture, namely UltraHiT, that integrates high-level variation assessment with low-level action decision. Our motivation stems from conceptualizing individual vascular structures as morphological variations derived from a standard vascular model. The high-level module identifies variation and switches between two low-level modules: an adaptive corrector for variations, or a standard executor for normal cases. Specifically, both the high-level module and the adaptive corrector are implemented as causal transformers that generate predictions based on the historical scanning sequence. To ensure generalizability, we collected the first large-scale ICA scanning dataset comprising 164 trajectories and 72K samples from 28 subjects of both genders. Based on the above innovations, our approach achieves a 95% success rate in locating the ICA on unseen individuals, outperforming baselines and demonstrating its effectiveness. Our code will be released after acceptance.
A Unified Interaction Control Framework for Safe Robotic Ultrasound Scanning with Human-Intention-Aware Compliance
Nov 29, 2024



The ultrasound scanning robot operates in environments where frequent human-robot interactions occur. Most existing control methods for ultrasound scanning address only one specific interaction situation or implement hard switches between controllers for different situations, which compromises both safety and efficiency. In this paper, we propose a unified interaction control framework for ultrasound scanning robots capable of handling all common interactions, distinguishing both human-intended and unintended types, and adapting with appropriate compliance. Specifically, the robot suspends or modulates its ongoing main task if the interaction is intended, e.g., when the doctor grasps the robot to lead the end effector actively. Furthermore, it can identify unintended interactions and avoid potential collision in the null space beforehand. Even if that collision has happened, it can become compliant with the collision in the null space and try to reduce its impact on the main task (where the scan is ongoing) kinematically and dynamically. The multiple situations are integrated into a unified controller with a smooth transition to deal with the interactions by exhibiting human-intention-aware compliance. Experimental results validate the framework's ability to cope with all common interactions including intended intervention and unintended collision in a collaborative carotid artery ultrasound scanning task.
Multi-Modal Interaction Control of Ultrasound Scanning Robots with Safe Human Guidance and Contact Recovery
Feb 11, 2023Ultrasound scanning robots enable the automatic imaging of a patient's internal organs by maintaining close contact between the ultrasound probe and the patient's body during a scanning procedure. Comprehensive, high-quality ultrasound scans are essential for providing the patient with an accurate diagnosis and effective treatment plan. An ultrasound scanning robot usually works in a doctor-robot co-existing environment, hence both efficiency and safety during the collaboration should be considered. In this paper, we propose a novel multi-modal control scheme for ultrasound scanning robots, in which three interaction modes are integrated into a single control input. Specifically, the scanning mode drives the robot to track a time-varying trajectory on the patient's body under the desired impedance model; the recovery mode allows the robot to actively recontact the body whenever physical contact between the ultrasound probe and the patient's body is lost; the human-guided mode renders the robot passive such that the doctor can safely intervene to manually reposition the probe. The integration of multiple modes allows the doctor to intervene safely at any time during the task and also maximizes the robot's autonomous scanning ability. The performance of the robot is validated on a collaborative scanning task of a carotid artery examination.
A Complementary Framework for Human-Robot Collaboration with a Mixed AR-Haptic Interface
Oct 12, 2022
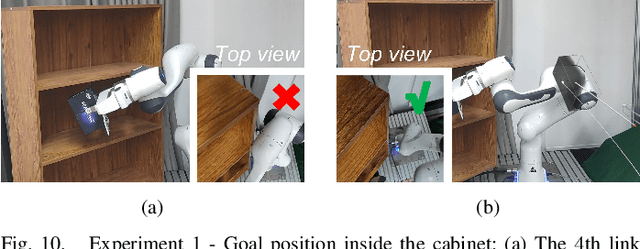
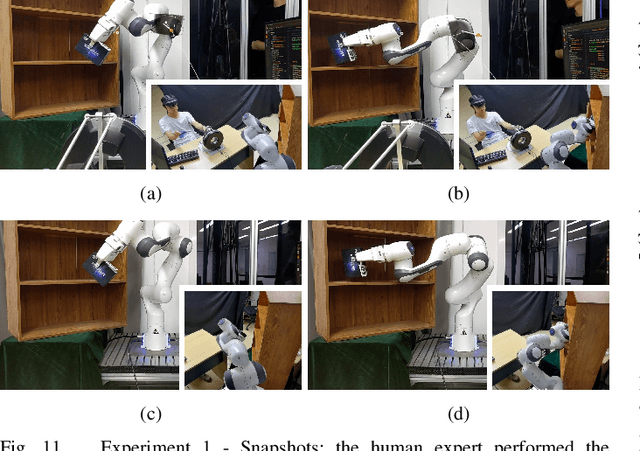
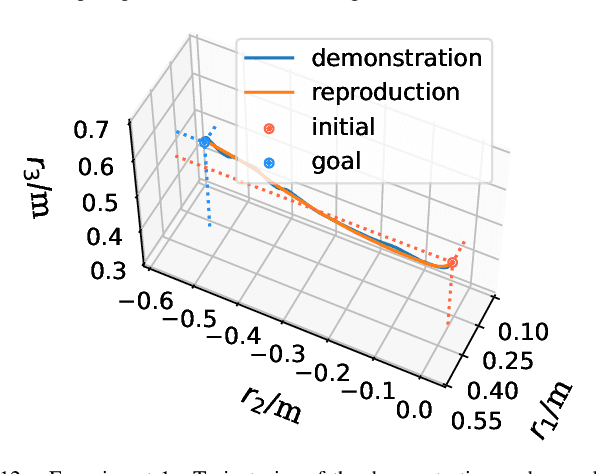
There is invariably a trade-off between safety and efficiency for collaborative robots (cobots) in human-robot collaborations. Robots that interact minimally with humans can work with high speed and accuracy but cannot adapt to new tasks or respond to unforeseen changes, whereas robots that work closely with humans can but only by becoming passive to humans, meaning that their main tasks suspended and efficiency compromised. Accordingly, this paper proposes a new complementary framework for human-robot collaboration that balances the safety of humans and the efficiency of robots. In this framework, the robot carries out given tasks using a vision-based adaptive controller, and the human expert collaborates with the robot in the null space. Such a decoupling drives the robot to deal with existing issues in task space (e.g., uncalibrated camera, limited field of view) and in null space (e.g., joint limits) by itself while allowing the expert to adjust the configuration of the robot body to respond to unforeseen changes (e.g., sudden invasion, change of environment) without affecting the robot's main task. Additionally, the robot can simultaneously learn the expert's demonstration in task space and null space beforehand with dynamic movement primitives (DMP). Therefore, an expert's knowledge and a robot's capability are both explored and complementary. Human demonstration and involvement are enabled via a mixed interaction interface, i.e., augmented reality (AR) and haptic devices. The stability of the closed-loop system is rigorously proved with Lyapunov methods. Experimental results in various scenarios are presented to illustrate the performance of the proposed method.