 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeH-RINS: Hierarchical Tightly-coupled Radar-Inertial Navigation via Smoothing and Mapping
Mar 14, 2026Millimeter-wave radar provides robust perception in visually degraded environments. However, radar-inertial state estimation is inherently susceptible to drift. Because radar yields only sparse, body-frame velocity measurements, it provides weak constraints on absolute orientation. Consequently, IMU biases remain poorly observable over the short time horizons typical of sliding-window filters. To address this fundamental observability challenge, we propose a tightly coupled, hierarchical radar-inertial factor graph framework. Our architecture decouples the estimation problem into a high-rate resetting graph and a persistent global graph. The resetting graph fuses IMU preintegration, radar velocities, and adaptive Zero-Velocity Updates (ZUPT) to generate the smooth, low-latency odometry required for real-time control. Concurrently, the persistent graph is a full-state factor graph maintaining the complete information of poses, velocities, and biases by fusing inertial data with keyframe-based geometric mapping and loop closures. Leveraging Incremental Smoothing and Mapping, the persistent graph can operate without explicit marginalization of variables, preserving their information while ensuring long-term bias observability. The cornerstone of our approach is a probabilistic tight-coupling mechanism: fully observable, optimized biases and their exact covariances are continuously injected from the persistent graph into the resetting graph's prior, effectively anchoring the high-rate estimator against integration drift. Extensive evaluations demonstrate our system achieves high accuracy with drift-reduced estimation at 27x real-time execution speeds. We release the implementation code and datasets upon the acceptance of the paper.
SwarmVLM: VLM-Guided Impedance Control for Autonomous Navigation of Heterogeneous Robots in Dynamic Warehousing
Aug 11, 2025With the growing demand for efficient logistics, unmanned aerial vehicles (UAVs) are increasingly being paired with automated guided vehicles (AGVs). While UAVs offer the ability to navigate through dense environments and varying altitudes, they are limited by battery life, payload capacity, and flight duration, necessitating coordinated ground support. Focusing on heterogeneous navigation, SwarmVLM addresses these limitations by enabling semantic collaboration between UAVs and ground robots through impedance control. The system leverages the Vision Language Model (VLM) and the Retrieval-Augmented Generation (RAG) to adjust impedance control parameters in response to environmental changes. In this framework, the UAV acts as a leader using Artificial Potential Field (APF) planning for real-time navigation, while the ground robot follows via virtual impedance links with adaptive link topology to avoid collisions with short obstacles. The system demonstrated a 92% success rate across 12 real-world trials. Under optimal lighting conditions, the VLM-RAG framework achieved 8% accuracy in object detection and selection of impedance parameters. The mobile robot prioritized short obstacle avoidance, occasionally resulting in a lateral deviation of up to 50 cm from the UAV path, which showcases safe navigation in a cluttered setting.
CognitiveOS: Large Multimodal Model based System to Endow Any Type of Robot with Generative AI
Jan 29, 2024



This paper introduces CognitiveOS, a disruptive system based on multiple transformer-based models, endowing robots of various types with cognitive abilities not only for communication with humans but also for task resolution through physical interaction with the environment. The system operates smoothly on different robotic platforms without extra tuning. It autonomously makes decisions for task execution by analyzing the environment and using information from its long-term memory. The system underwent testing on various platforms, including quadruped robots and manipulator robots, showcasing its capability to formulate behavioral plans even for robots whose behavioral examples were absent in the training dataset. Experimental results revealed the system's high performance in advanced task comprehension and adaptability, emphasizing its potential for real-world applications. The chapters of this paper describe the key components of the system and the dataset structure. The dataset for fine-tuning step generation model is provided at the following link: link coming soon
CognitiveDog: Large Multimodal Model Based System to Translate Vision and Language into Action of Quadruped Robot
Jan 17, 2024



This paper introduces CognitiveDog, a pioneering development of quadruped robot with Large Multi-modal Model (LMM) that is capable of not only communicating with humans verbally but also physically interacting with the environment through object manipulation. The system was realized on Unitree Go1 robot-dog equipped with a custom gripper and demonstrated autonomous decision-making capabilities, independently determining the most appropriate actions and interactions with various objects to fulfill user-defined tasks. These tasks do not necessarily include direct instructions, challenging the robot to comprehend and execute them based on natural language input and environmental cues. The paper delves into the intricacies of this system, dataset characteristics, and the software architecture. Key to this development is the robot's proficiency in navigating space using Visual-SLAM, effectively manipulating and transporting objects, and providing insightful natural language commentary during task execution. Experimental results highlight the robot's advanced task comprehension and adaptability, underscoring its potential in real-world applications. The dataset used to fine-tune the robot-dog behavior generation model is provided at the following link: huggingface.co/datasets/ArtemLykov/CognitiveDog_dataset
LLM-MARS: Large Language Model for Behavior Tree Generation and NLP-enhanced Dialogue in Multi-Agent Robot Systems
Dec 14, 2023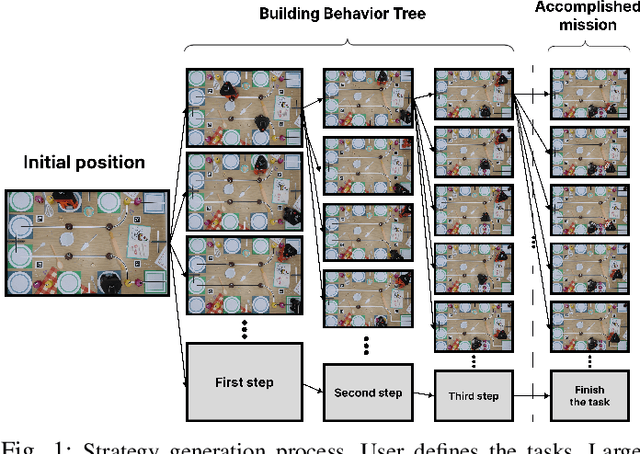

This paper introduces LLM-MARS, first technology that utilizes a Large Language Model based Artificial Intelligence for Multi-Agent Robot Systems. LLM-MARS enables dynamic dialogues between humans and robots, allowing the latter to generate behavior based on operator commands and provide informative answers to questions about their actions. LLM-MARS is built on a transformer-based Large Language Model, fine-tuned from the Falcon 7B model. We employ a multimodal approach using LoRa adapters for different tasks. The first LoRa adapter was developed by fine-tuning the base model on examples of Behavior Trees and their corresponding commands. The second LoRa adapter was developed by fine-tuning on question-answering examples. Practical trials on a multi-agent system of two robots within the Eurobot 2023 game rules demonstrate promising results. The robots achieve an average task execution accuracy of 79.28% in compound commands. With commands containing up to two tasks accuracy exceeded 90%. Evaluation confirms the system's answers on operators questions exhibit high accuracy, relevance, and informativeness. LLM-MARS and similar multi-agent robotic systems hold significant potential to revolutionize logistics, enabling autonomous exploration missions and advancing Industry 5.0.