 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-MARS: Large Language Model for Behavior Tree Generation and NLP-enhanced Dialogue in Multi-Agent Robot Systems
Dec 14, 2023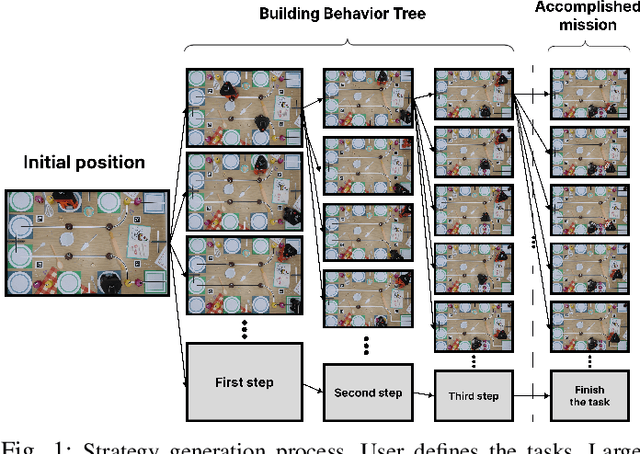

This paper introduces LLM-MARS, first technology that utilizes a Large Language Model based Artificial Intelligence for Multi-Agent Robot Systems. LLM-MARS enables dynamic dialogues between humans and robots, allowing the latter to generate behavior based on operator commands and provide informative answers to questions about their actions. LLM-MARS is built on a transformer-based Large Language Model, fine-tuned from the Falcon 7B model. We employ a multimodal approach using LoRa adapters for different tasks. The first LoRa adapter was developed by fine-tuning the base model on examples of Behavior Trees and their corresponding commands. The second LoRa adapter was developed by fine-tuning on question-answering examples. Practical trials on a multi-agent system of two robots within the Eurobot 2023 game rules demonstrate promising results. The robots achieve an average task execution accuracy of 79.28% in compound commands. With commands containing up to two tasks accuracy exceeded 90%. Evaluation confirms the system's answers on operators questions exhibit high accuracy, relevance, and informativeness. LLM-MARS and similar multi-agent robotic systems hold significant potential to revolutionize logistics, enabling autonomous exploration missions and advancing Industry 5.0.
MorphoLander: Reinforcement Learning Based Landing of a Group of Drones on the Adaptive Morphogenetic UAV
Jul 28, 2023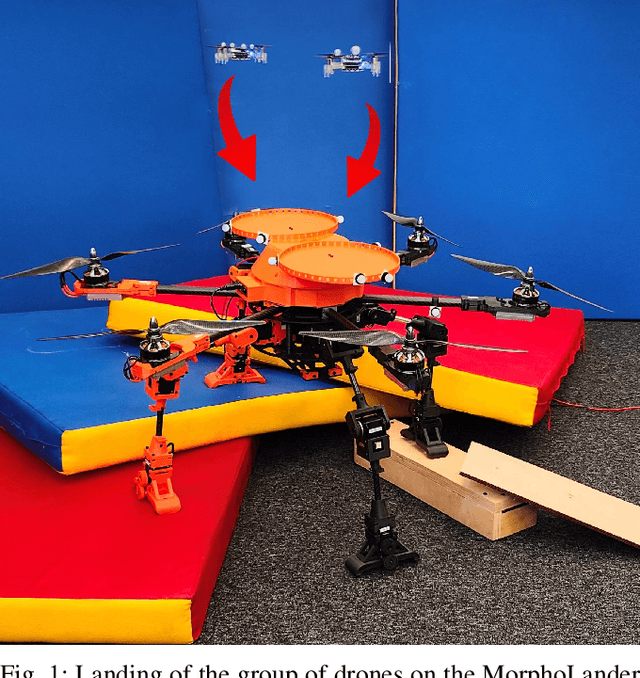
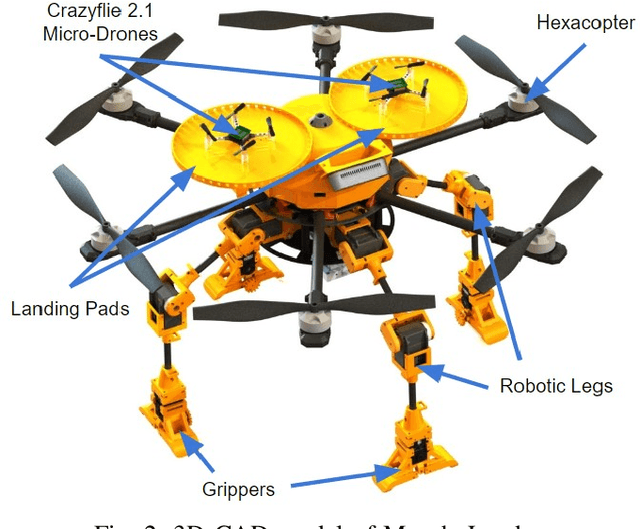
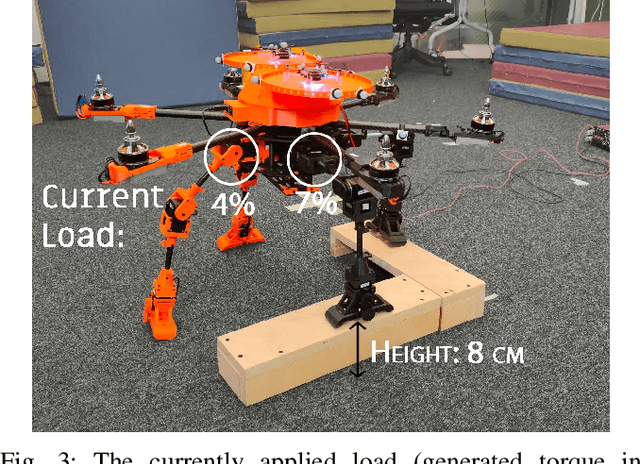
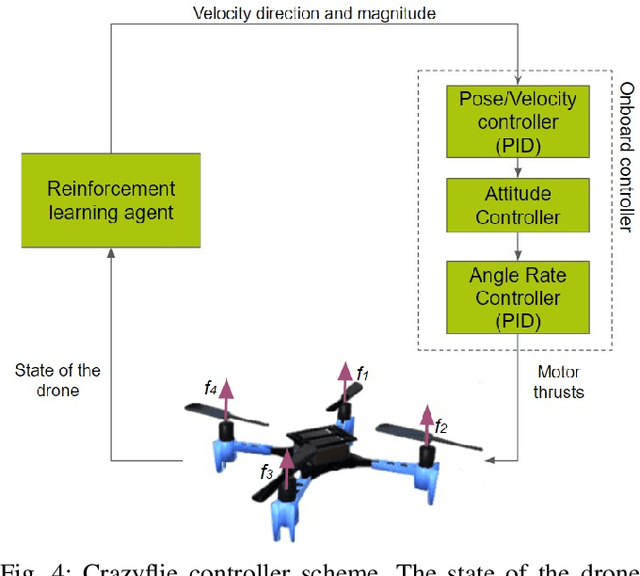
This paper focuses on a novel robotic system MorphoLander representing heterogeneous swarm of drones for exploring rough terrain environments. The morphogenetic leader drone is capable of landing on uneven terrain, traversing it, and maintaining horizontal position to deploy smaller drones for extensive area exploration. After completing their tasks, these drones return and land back on the landing pads of MorphoGear. The reinforcement learning algorithm was developed for a precise landing of drones on the leader robot that either remains static during their mission or relocates to the new position. Several experiments were conducted to evaluate the performance of the developed landing algorithm under both even and uneven terrain conditions. The experiments revealed that the proposed system results in high landing accuracy of 0.5 cm when landing on the leader drone under even terrain conditions and 2.35 cm under uneven terrain conditions. MorphoLander has the potential to significantly enhance the efficiency of the industrial inspections, seismic surveys, and rescue missions in highly cluttered and unstructured environments.
SwarmGear: Heterogeneous Swarm of Drones with Reconfigurable Leader Drone and Virtual Impedance Links for Multi-Robot Inspection
Apr 06, 2023



The continuous monitoring by drone swarms remains a challenging problem due to the lack of power supply and the inability of drones to land on uneven surfaces. Heterogeneous swarms, including ground and aerial vehicles, can support longer inspections and carry a higher number of sensors on board. However, their capabilities are limited by the mobility of wheeled and legged robots in a cluttered environment. In this paper, we propose a novel concept for autonomous inspection that we call SwarmGear. SwarmGear utilizes a heterogeneous swarm that investigates the environment in a leader-follower formation. The leader drone is able to land on rough terrain and traverse it by four compliant robotic legs, possessing both the functionalities of an aerial and mobile robot. To preserve the formation of the swarm during its motion, virtual impedance links were developed between the leader and the follower drones. We evaluated experimentally the accuracy of the hybrid leader drone's ground locomotion. By changing the step parameters, the optimal step configuration was found. Two types of gaits were evaluated. The experiments revealed low crosstrack error (mean of 2 cm and max of 4.8 cm) and the ability of the leader drone to move with a 190 mm step length and a 3 degree standard yaw deviation. Four types of drone formations were considered. The best formation was used for experiments with SwarmGear, and it showed low overall crosstrack error for the swarm (mean 7.9 cm for the type 1 gait and 5.1 cm for the type 2 gait). The proposed system can potentially improve the performance of autonomous swarms in cluttered and unstructured environments by allowing all agents of the swarm to switch between aerial and ground formations to overcome various obstacles and perform missions over a large area.