 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMorphoNavi: Aerial-Ground Robot Navigation with Object Oriented Mapping in Digital Twin
Apr 23, 2025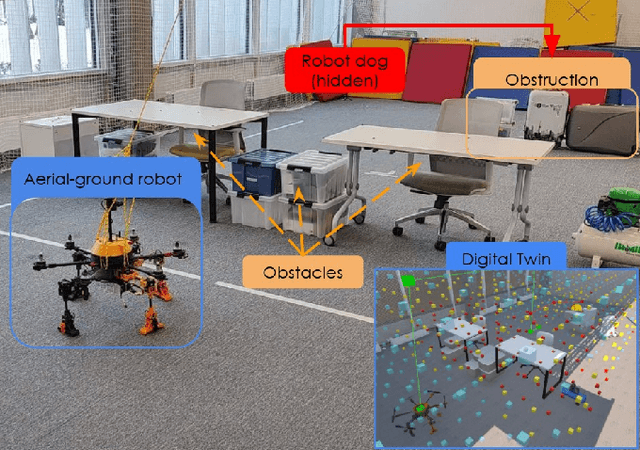
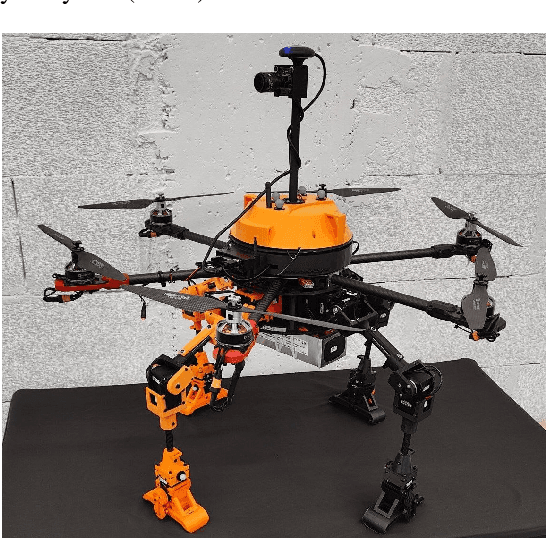
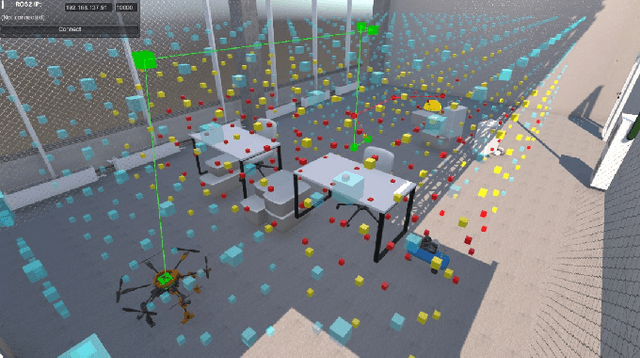
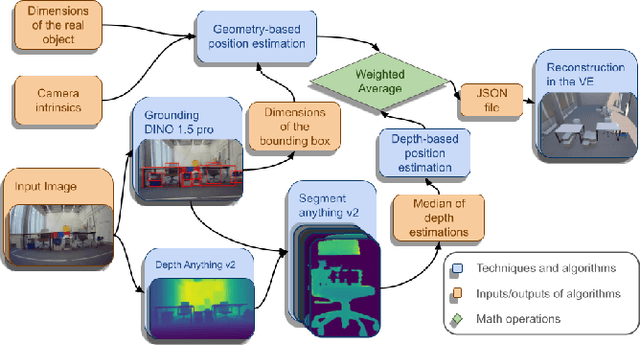
This paper presents a novel mapping approach for a universal aerial-ground robotic system utilizing a single monocular camera. The proposed system is capable of detecting a diverse range of objects and estimating their positions without requiring fine-tuning for specific environments. The system's performance was evaluated through a simulated search-and-rescue scenario, where the MorphoGear robot successfully located a robotic dog while an operator monitored the process. This work contributes to the development of intelligent, multimodal robotic systems capable of operating in unstructured environments.
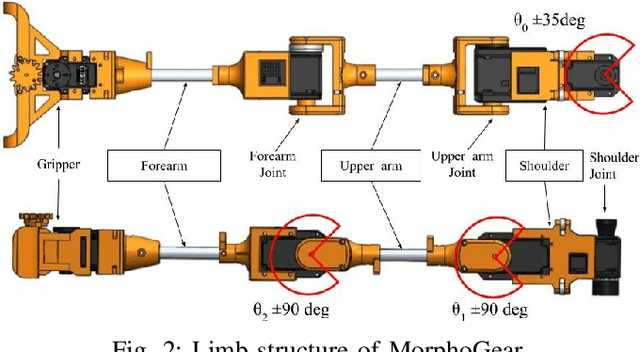
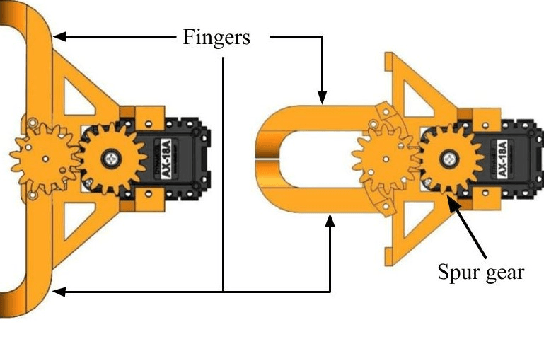
MorphoGear: An UAV with Multi-Limb Morphogenetic Gear for Rough-Terrain Locomotion
Mar 13, 2024Robots able to run, fly, and grasp have a high potential to solve a wide scope of tasks and navigate in complex environments. Several mechatronic designs of such robots with adaptive morphologies are emerging. However, the task of landing on an uneven surface, traversing rough terrain, and manipulating objects still presents high challenges. This paper introduces the design of a novel rotor UAV MorphoGear with morphogenetic gear and includes a description of the robot's mechanics, electronics, and control architecture, as well as walking behavior and an analysis of experimental results. MorphoGear is able to fly, walk on surfaces with several gaits, and grasp objects with four compatible robotic limbs. Robotic limbs with three degrees of freedom (DoFs) are used by this UAV as pedipulators when walking or flying and as manipulators when performing actions in the environment. We performed a locomotion analysis of the landing gear of the robot. Three types of robot gaits have been developed. The experimental results revealed low crosstrack error of the most accurate gait (mean of 1.9 cm and max of 5.5 cm) and the ability of the drone to move with a 210 mm step length. Another type of robot gait also showed low crosstrack error (mean of 2.3 cm and max of 6.9 cm). The proposed MorphoGear system can potentially achieve a high scope of tasks in environmental surveying, delivery, and high-altitude operations.
MorphoLander: Reinforcement Learning Based Landing of a Group of Drones on the Adaptive Morphogenetic UAV
Jul 28, 2023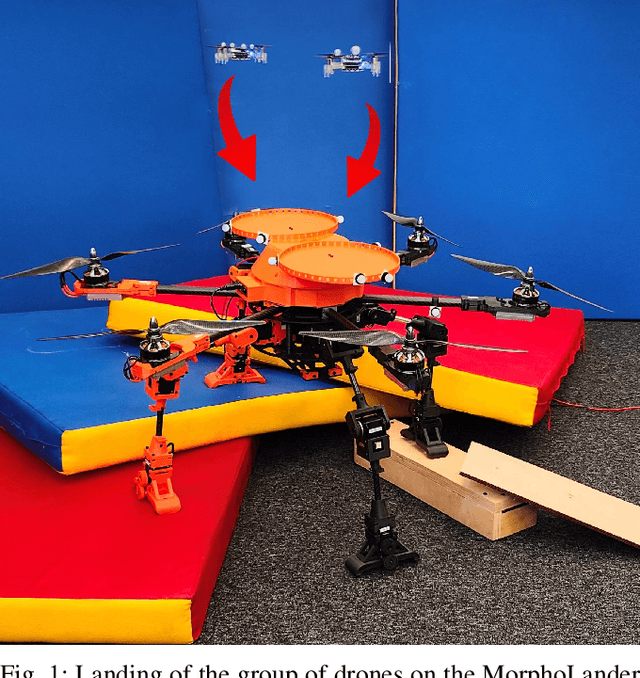
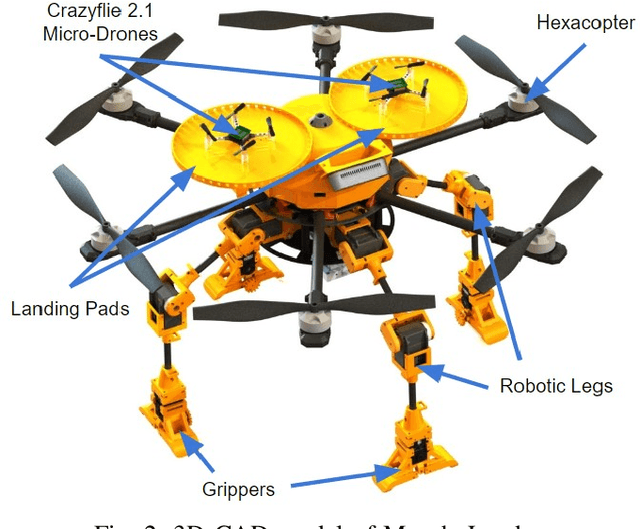
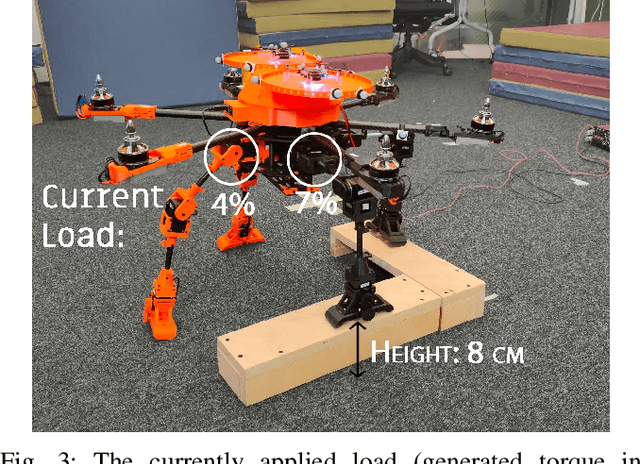
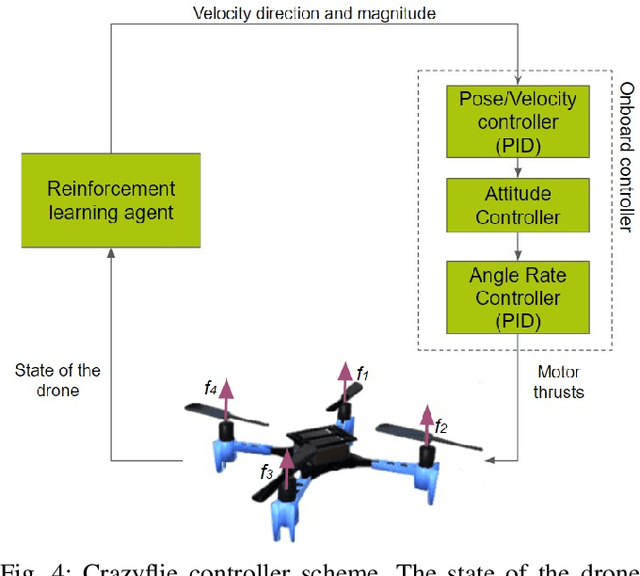
This paper focuses on a novel robotic system MorphoLander representing heterogeneous swarm of drones for exploring rough terrain environments. The morphogenetic leader drone is capable of landing on uneven terrain, traversing it, and maintaining horizontal position to deploy smaller drones for extensive area exploration. After completing their tasks, these drones return and land back on the landing pads of MorphoGear. The reinforcement learning algorithm was developed for a precise landing of drones on the leader robot that either remains static during their mission or relocates to the new position. Several experiments were conducted to evaluate the performance of the developed landing algorithm under both even and uneven terrain conditions. The experiments revealed that the proposed system results in high landing accuracy of 0.5 cm when landing on the leader drone under even terrain conditions and 2.35 cm under uneven terrain conditions. MorphoLander has the potential to significantly enhance the efficiency of the industrial inspections, seismic surveys, and rescue missions in highly cluttered and unstructured environments.
MorphoArms: Morphogenetic Teleoperation of Multimanual Robot
Jul 06, 2023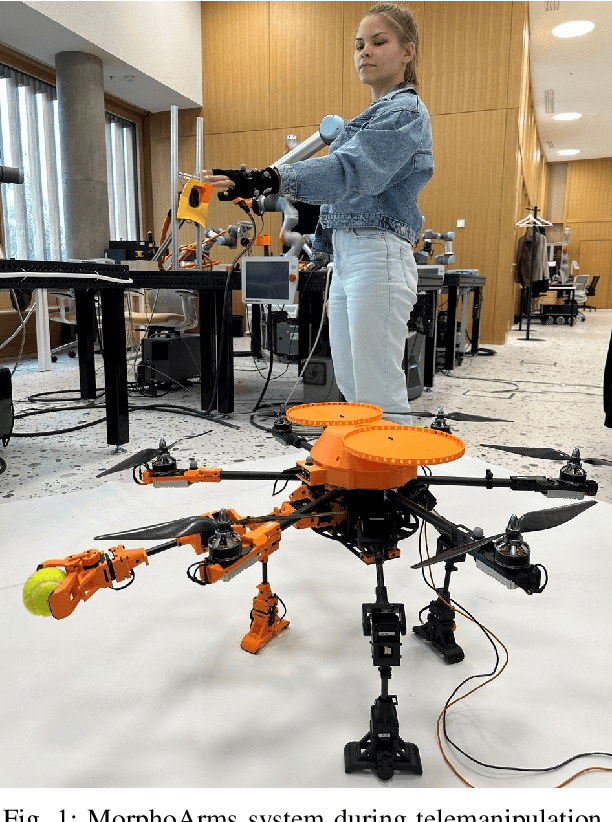

Nowadays, there are few unmanned aerial vehicles (UAVs) capable of flying, walking and grasping. A drone with all these functionalities can significantly improve its performance in complex tasks such as monitoring and exploring different types of terrain, and rescue operations. This paper presents MorphoArms, a novel system that consists of a morphogenetic chassis and a hand gesture recognition teleoperation system. The mechanics, electronics, control architecture, and walking behavior of the morphogenetic chassis are described. This robot is capable of walking and grasping objects using four robotic limbs. Robotic limbs with four degrees-of-freedom are used as pedipulators when walking and as manipulators when performing actions in the environment. The robot control system is implemented using teleoperation, where commands are given by hand gestures. A motion capture system is used to track the user's hands and to recognize their gestures. The method of controlling the robot was experimentally tested in a study involving 10 users. The evaluation included three questionnaires (NASA TLX, SUS, and UEQ). The results showed that the proposed system was more user-friendly than 56% of the systems, and it was rated above average in terms of attractiveness, stimulation, and novelty.
SwarmGear: Heterogeneous Swarm of Drones with Reconfigurable Leader Drone and Virtual Impedance Links for Multi-Robot Inspection
Apr 06, 2023



The continuous monitoring by drone swarms remains a challenging problem due to the lack of power supply and the inability of drones to land on uneven surfaces. Heterogeneous swarms, including ground and aerial vehicles, can support longer inspections and carry a higher number of sensors on board. However, their capabilities are limited by the mobility of wheeled and legged robots in a cluttered environment. In this paper, we propose a novel concept for autonomous inspection that we call SwarmGear. SwarmGear utilizes a heterogeneous swarm that investigates the environment in a leader-follower formation. The leader drone is able to land on rough terrain and traverse it by four compliant robotic legs, possessing both the functionalities of an aerial and mobile robot. To preserve the formation of the swarm during its motion, virtual impedance links were developed between the leader and the follower drones. We evaluated experimentally the accuracy of the hybrid leader drone's ground locomotion. By changing the step parameters, the optimal step configuration was found. Two types of gaits were evaluated. The experiments revealed low crosstrack error (mean of 2 cm and max of 4.8 cm) and the ability of the leader drone to move with a 190 mm step length and a 3 degree standard yaw deviation. Four types of drone formations were considered. The best formation was used for experiments with SwarmGear, and it showed low overall crosstrack error for the swarm (mean 7.9 cm for the type 1 gait and 5.1 cm for the type 2 gait). The proposed system can potentially improve the performance of autonomous swarms in cluttered and unstructured environments by allowing all agents of the swarm to switch between aerial and ground formations to overcome various obstacles and perform missions over a large area.