Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMorphoNavi: Aerial-Ground Robot Navigation with Object Oriented Mapping in Digital Twin
Paper and Code
Apr 23, 2025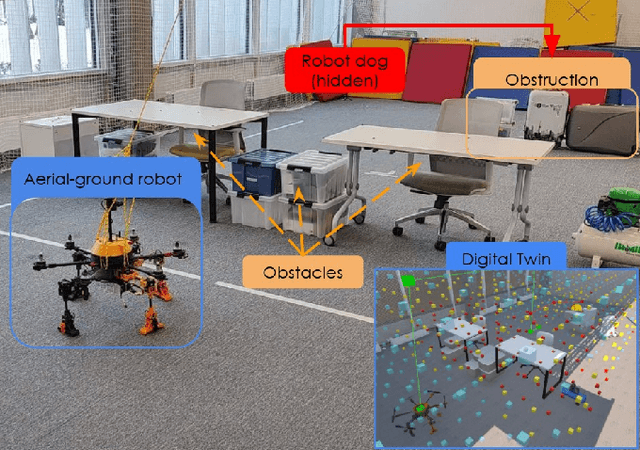
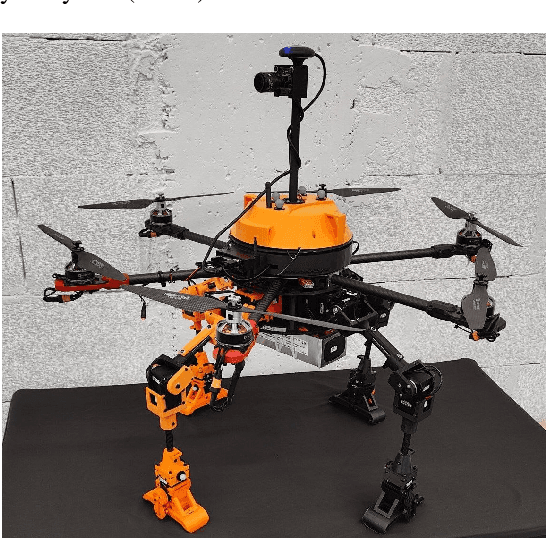
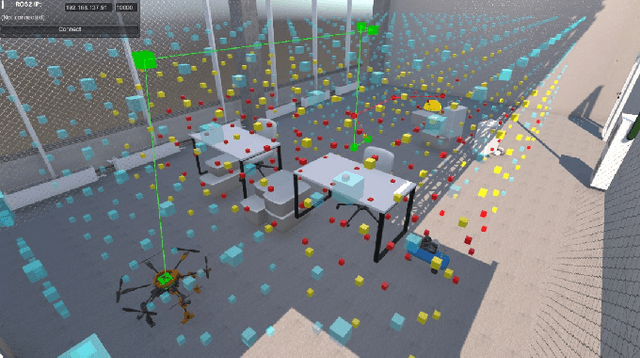
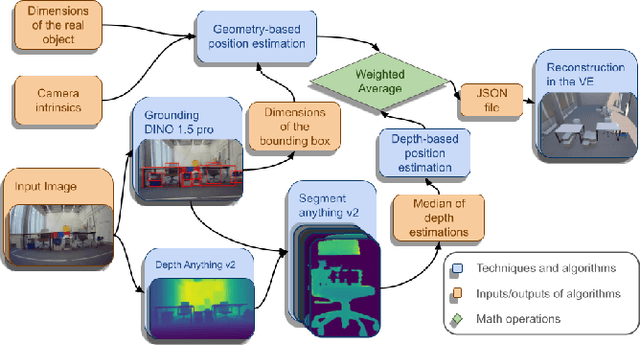
This paper presents a novel mapping approach for a universal aerial-ground robotic system utilizing a single monocular camera. The proposed system is capable of detecting a diverse range of objects and estimating their positions without requiring fine-tuning for specific environments. The system's performance was evaluated through a simulated search-and-rescue scenario, where the MorphoGear robot successfully located a robotic dog while an operator monitored the process. This work contributes to the development of intelligent, multimodal robotic systems capable of operating in unstructured environments.
View paper on