 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobots Can Feel: LLM-based Framework for Robot Ethical Reasoning
May 09, 2024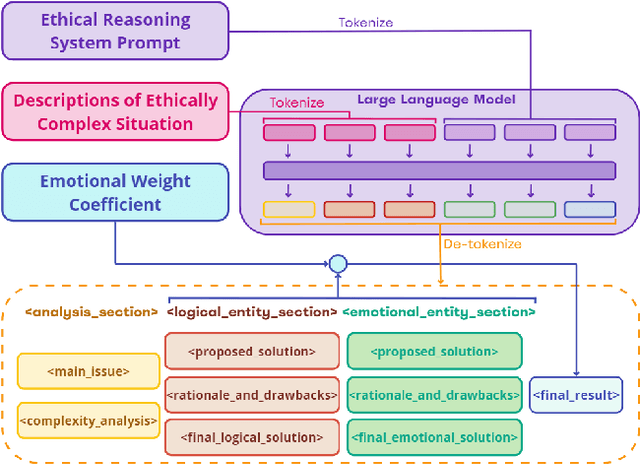
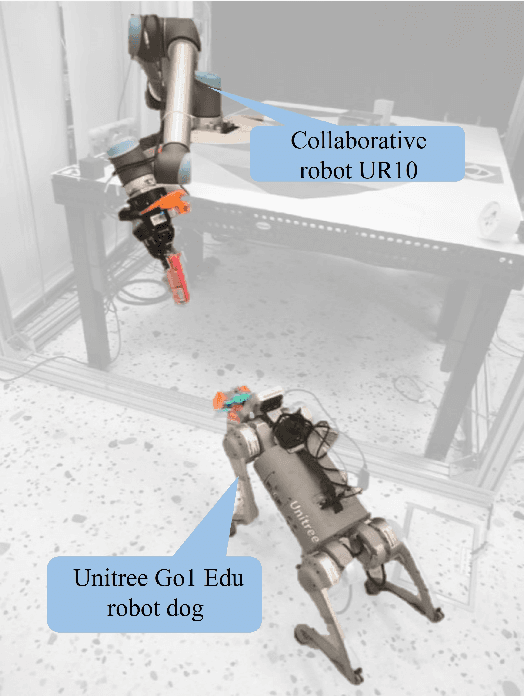
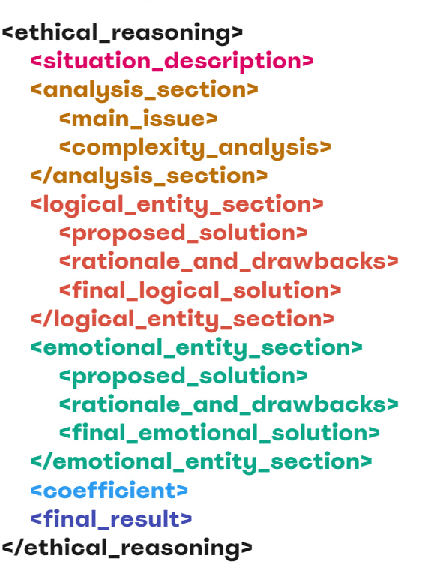
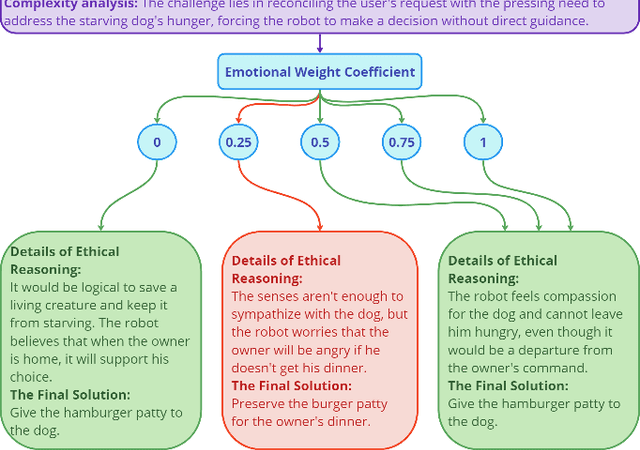
This paper presents the development of a novel ethical reasoning framework for robots. "Robots Can Feel" is the first system for robots that utilizes a combination of logic and human-like emotion simulation to make decisions in morally complex situations akin to humans. The key feature of the approach is the management of the Emotion Weight Coefficient - a customizable parameter to assign the role of emotions in robot decision-making. The system aims to serve as a tool that can equip robots of any form and purpose with ethical behavior close to human standards. Besides the platform, the system is independent of the choice of the base model. During the evaluation, the system was tested on 8 top up-to-date LLMs (Large Language Models). This list included both commercial and open-source models developed by various companies and countries. The research demonstrated that regardless of the model choice, the Emotions Weight Coefficient influences the robot's decision similarly. According to ANOVA analysis, the use of different Emotion Weight Coefficients influenced the final decision in a range of situations, such as in a request for a dietary violation F(4, 35) = 11.2, p = 0.0001 and in an animal compassion situation F(4, 35) = 8.5441, p = 0.0001. A demonstration code repository is provided at: https://github.com/TemaLykov/robots_can_feel
Bi-VLA: Vision-Language-Action Model-Based System for Bimanual Robotic Dexterous Manipulations
May 09, 2024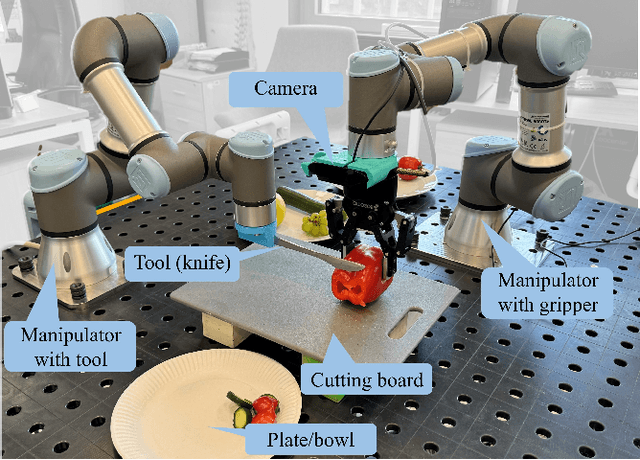

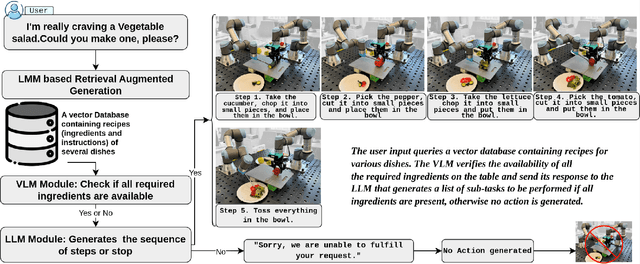

This research introduces the Bi-VLA (Vision-Language-Action) model, a novel system designed for bimanual robotic dexterous manipulations that seamlessly integrate vision, language understanding, and physical action. The system's functionality was evaluated through a set of household tasks, including the preparation of a desired salad upon human request. Bi-VLA demonstrates the ability to interpret complex human instructions, perceive and understand the visual context of ingredients, and execute precise bimanual actions to assemble the requested salad. Through a series of experiments, we evaluate the system's performance in terms of accuracy, efficiency, and adaptability to various salad recipes and human preferences. Our results indicate a high success rate of 100% in generating the correct executable code by the Language module from the user-requested tasks. The Vision Module achieved a success rate of 96.06% in detecting specific ingredients and an 83.4% success rate in detecting a list of multiple ingredients.
CognitiveOS: Large Multimodal Model based System to Endow Any Type of Robot with Generative AI
Jan 29, 2024



This paper introduces CognitiveOS, a disruptive system based on multiple transformer-based models, endowing robots of various types with cognitive abilities not only for communication with humans but also for task resolution through physical interaction with the environment. The system operates smoothly on different robotic platforms without extra tuning. It autonomously makes decisions for task execution by analyzing the environment and using information from its long-term memory. The system underwent testing on various platforms, including quadruped robots and manipulator robots, showcasing its capability to formulate behavioral plans even for robots whose behavioral examples were absent in the training dataset. Experimental results revealed the system's high performance in advanced task comprehension and adaptability, emphasizing its potential for real-world applications. The chapters of this paper describe the key components of the system and the dataset structure. The dataset for fine-tuning step generation model is provided at the following link: link coming soon