 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePack it in: Packing into Partially Filled Containers Through Contact
Feb 15, 2026The automation of warehouse operations is crucial for improving productivity and reducing human exposure to hazardous environments. One operation frequently performed in warehouses is bin-packing where items need to be placed into containers, either for delivery to a customer, or for temporary storage in the warehouse. Whilst prior bin-packing works have largely been focused on packing items into empty containers and have adopted collision-free strategies, it is often the case that containers will already be partially filled with items, often in suboptimal arrangements due to transportation about a warehouse. This paper presents a contact-aware packing approach that exploits purposeful interactions with previously placed objects to create free space and enable successful placement of new items. This is achieved by using a contact-based multi-object trajectory optimizer within a model predictive controller, integrated with a physics-aware perception system that estimates object poses even during inevitable occlusions, and a method that suggests physically-feasible locations to place the object inside the container.
State- and context-dependent robotic manipulation and grasping via uncertainty-aware imitation learning
Oct 31, 2024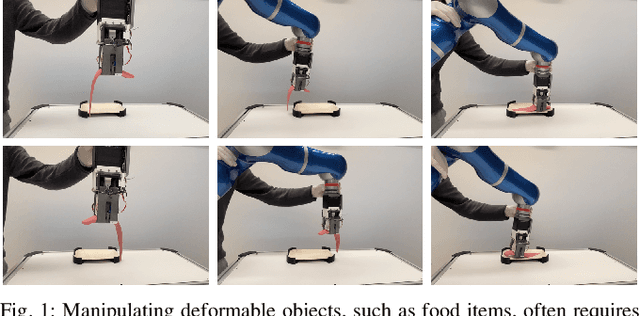
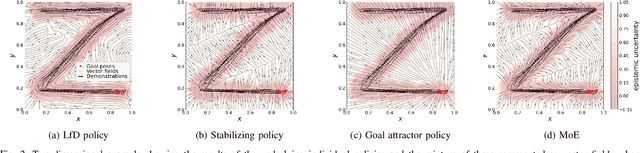

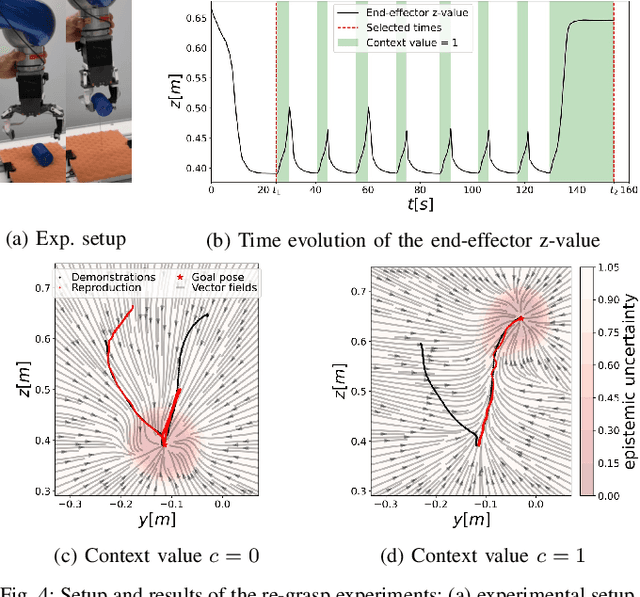
Generating context-adaptive manipulation and grasping actions is a challenging problem in robotics. Classical planning and control algorithms tend to be inflexible with regard to parameterization by external variables such as object shapes. In contrast, Learning from Demonstration (LfD) approaches, due to their nature as function approximators, allow for introducing external variables to modulate policies in response to the environment. In this paper, we utilize this property by introducing an LfD approach to acquire context-dependent grasping and manipulation strategies. We treat the problem as a kernel-based function approximation, where the kernel inputs include generic context variables describing task-dependent parameters such as the object shape. We build on existing work on policy fusion with uncertainty quantification to propose a state-dependent approach that automatically returns to demonstrations, avoiding unpredictable behavior while smoothly adapting to context changes. The approach is evaluated against the LASA handwriting dataset and on a real 7-DoF robot in two scenarios: adaptation to slippage while grasping and manipulating a deformable food item.
Research Challenges and Progress in Robotic Grasping and Manipulation Competitions
Aug 03, 2021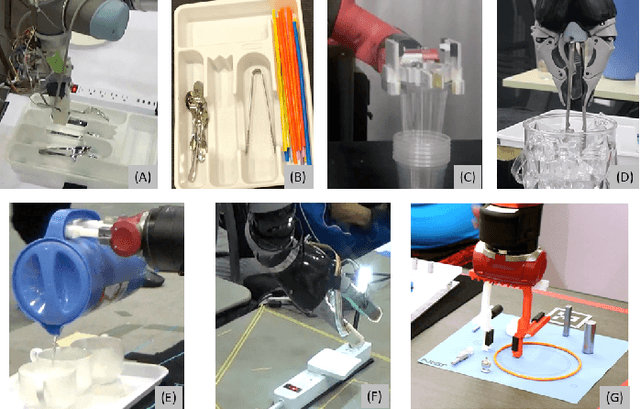
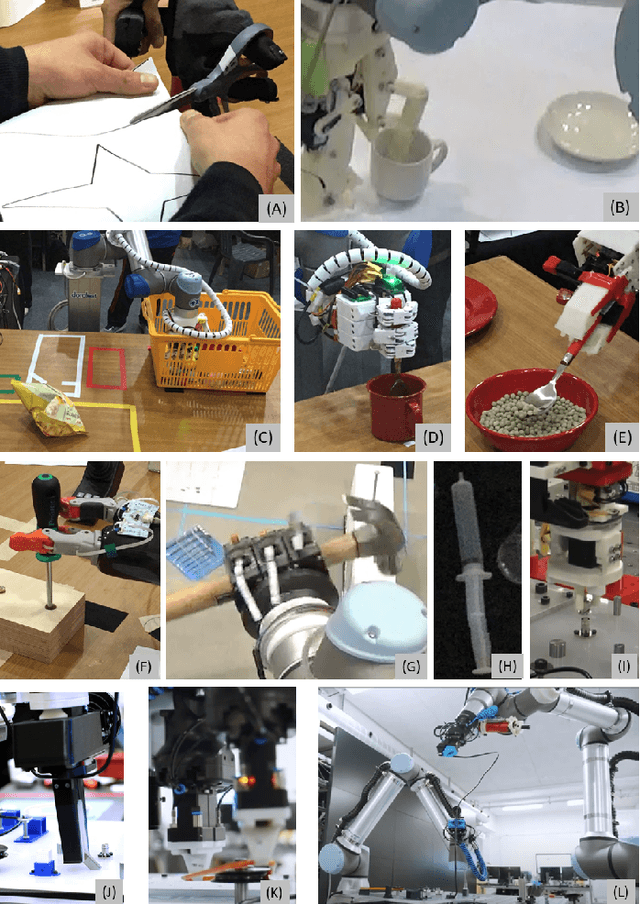

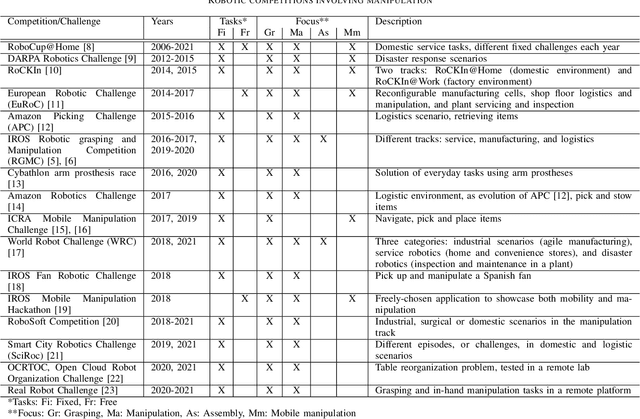
This paper discusses recent research progress in robotic grasping and manipulation in the light of the latest Robotic Grasping and Manipulation Competitions (RGMCs). We first provide an overview of past benchmarks and competitions related to the robotics manipulation field. Then, we discuss the methodology behind designing the manipulation tasks in RGMCs. We provide a detailed analysis of key challenges for each task and identify the most difficult aspects based on the competing teams' performance in recent years. We believe that such an analysis is insightful to determine the future research directions for the robotic manipulation domain.
OCRTOC: A Cloud-Based Competition and Benchmark for Robotic Grasping and Manipulation
Apr 23, 2021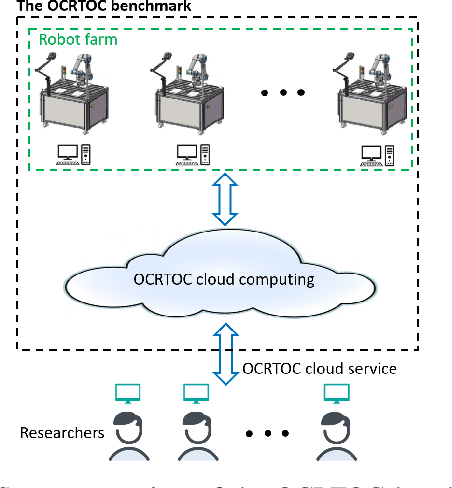
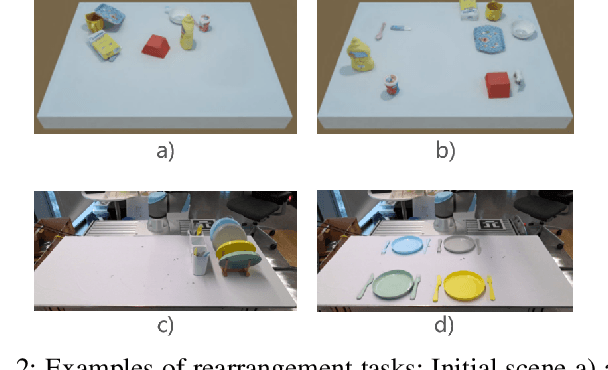
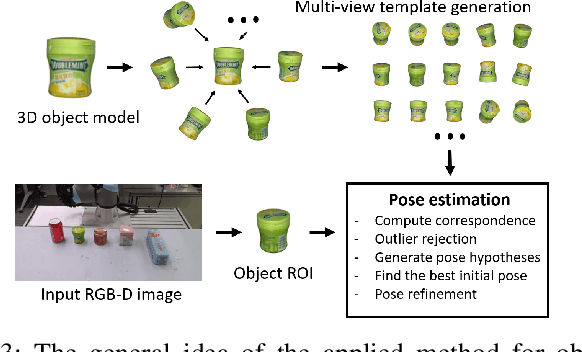
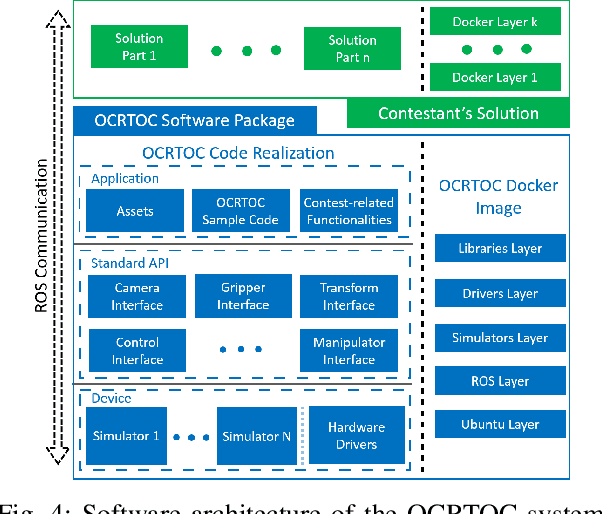
In this paper, we propose a cloud-based benchmark for robotic grasping and manipulation, called the OCRTOC benchmark. The benchmark focuses on the object rearrangement problem, specifically table organization tasks. We provide a set of identical real robot setups and facilitate remote experiments of standardized table organization scenarios in varying difficulties. In this workflow, users upload their solutions to our remote server and their code is executed on the real robot setups and scored automatically. After each execution, the OCRTOC team resets the experimental setup manually. We also provide a simulation environment that researchers can use to develop and test their solutions. With the OCRTOC benchmark, we aim to lower the barrier of conducting reproducible research on robotic grasping and manipulation and accelerate progress in this field. Executing standardized scenarios on identical real robot setups allows us to quantify algorithm performances and achieve fair comparisons. Using this benchmark we held a competition in the 2020 International Conference on Intelligence Robots and Systems (IROS 2020). In total, 59 teams took part in this competition worldwide. We present the results and our observations of the 2020 competition, and discuss our adjustments and improvements for the upcoming OCRTOC 2021 competition. The homepage of the OCRTOC competition is www.ocrtoc.org, and the OCRTOC software package is available at https://github.com/OCRTOC/OCRTOC_software_package.
CLASH WRIST -- A hardware to increase the capability of CLASH fruit gripper to use environment constraints exploration
Apr 02, 2020
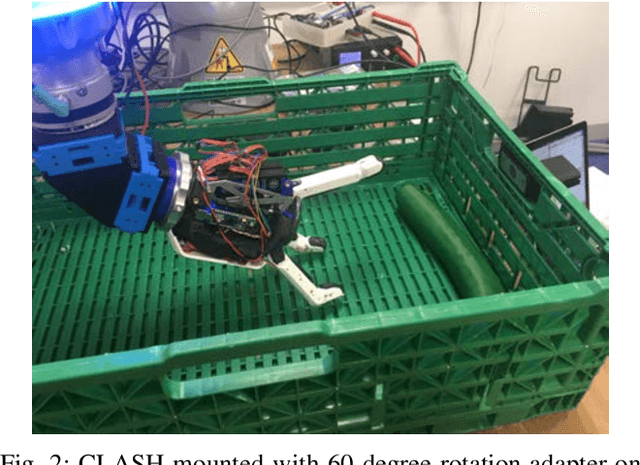

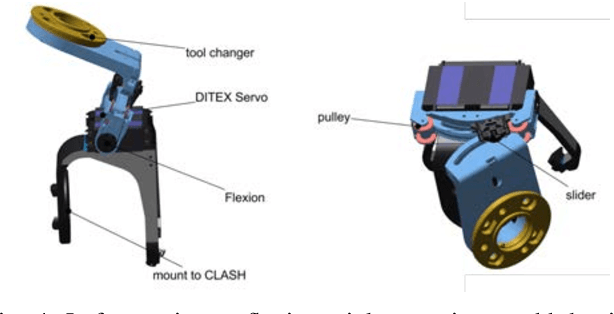
Humans use environmental constraints (EC) in manipulation to compensate for uncertainties in their world model. The same principle was recently applied to robotics, so that soft underactuated hands improve their grasping capability by using environmental constraints exploitation (ECE) [1]. Due to orientation of the robotic hand for example in the EC wall grasp, the length of the robot wrist plus the hand length gets quite important, if objects are grasp out of a box [2] . Most of the modern cobots have quite long wrist, so we have constructed a two degree of freedom wrist for the CLASH [3], to solve this problem (Fig. 1).