 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeState- and context-dependent robotic manipulation and grasping via uncertainty-aware imitation learning
Paper and Code
Oct 31, 2024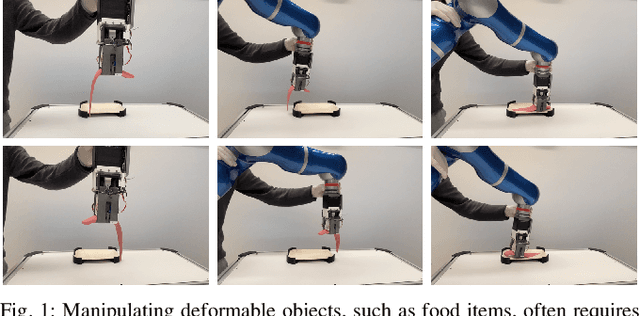
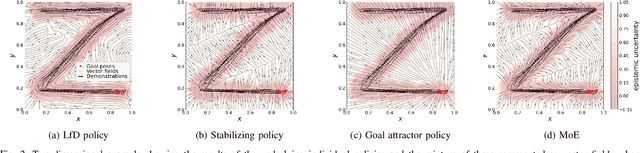

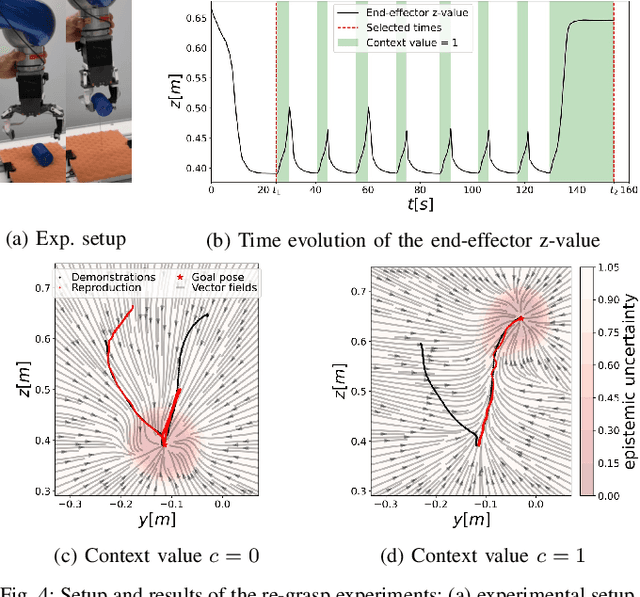
Generating context-adaptive manipulation and grasping actions is a challenging problem in robotics. Classical planning and control algorithms tend to be inflexible with regard to parameterization by external variables such as object shapes. In contrast, Learning from Demonstration (LfD) approaches, due to their nature as function approximators, allow for introducing external variables to modulate policies in response to the environment. In this paper, we utilize this property by introducing an LfD approach to acquire context-dependent grasping and manipulation strategies. We treat the problem as a kernel-based function approximation, where the kernel inputs include generic context variables describing task-dependent parameters such as the object shape. We build on existing work on policy fusion with uncertainty quantification to propose a state-dependent approach that automatically returns to demonstrations, avoiding unpredictable behavior while smoothly adapting to context changes. The approach is evaluated against the LASA handwriting dataset and on a real 7-DoF robot in two scenarios: adaptation to slippage while grasping and manipulating a deformable food item.