 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResearch Challenges and Progress in Robotic Grasping and Manipulation Competitions
Aug 03, 2021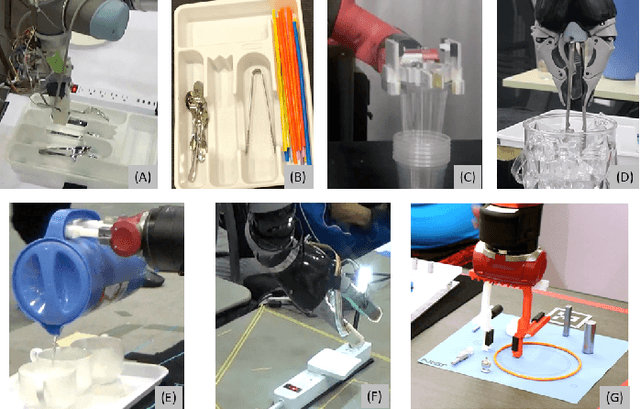
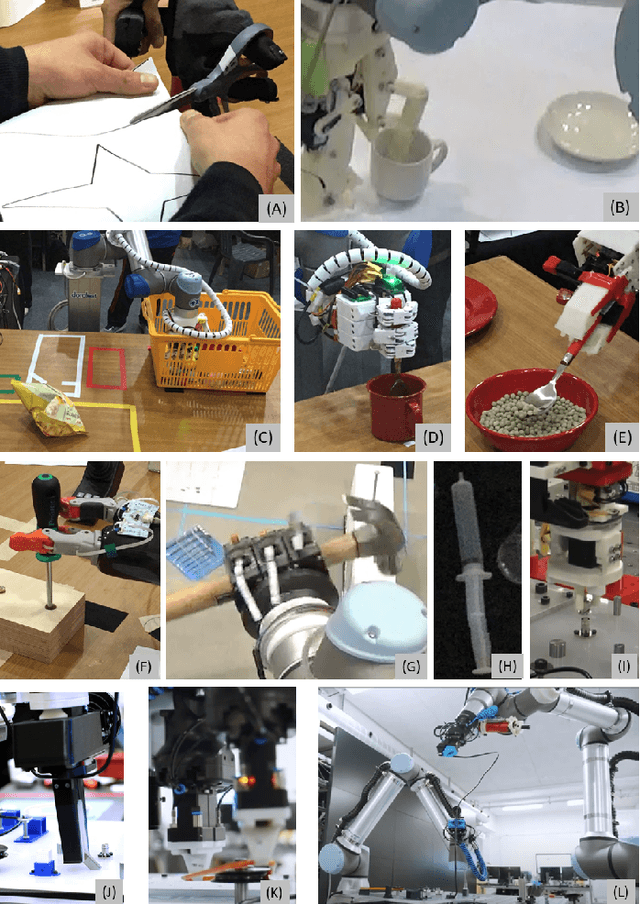

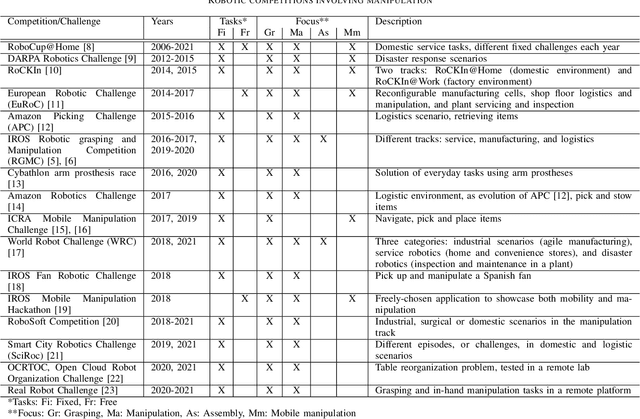
This paper discusses recent research progress in robotic grasping and manipulation in the light of the latest Robotic Grasping and Manipulation Competitions (RGMCs). We first provide an overview of past benchmarks and competitions related to the robotics manipulation field. Then, we discuss the methodology behind designing the manipulation tasks in RGMCs. We provide a detailed analysis of key challenges for each task and identify the most difficult aspects based on the competing teams' performance in recent years. We believe that such an analysis is insightful to determine the future research directions for the robotic manipulation domain.
Efficiently Improving and Quantifying Robot Accuracy In Situ
Aug 20, 2019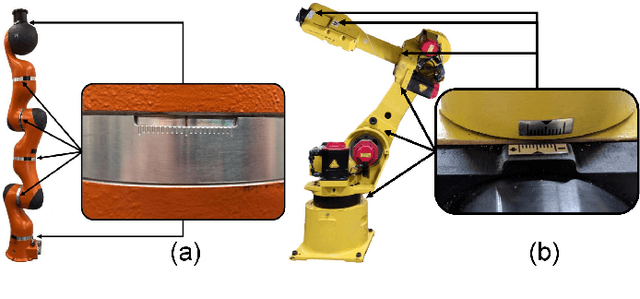
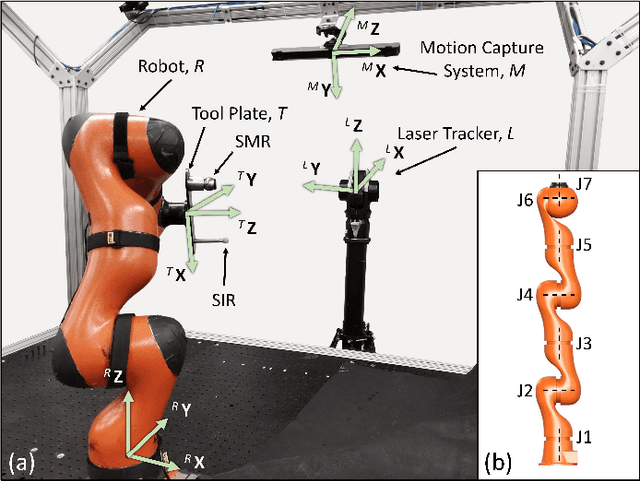
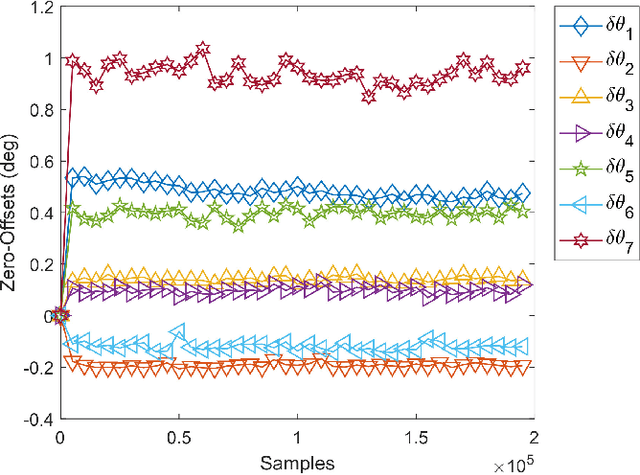
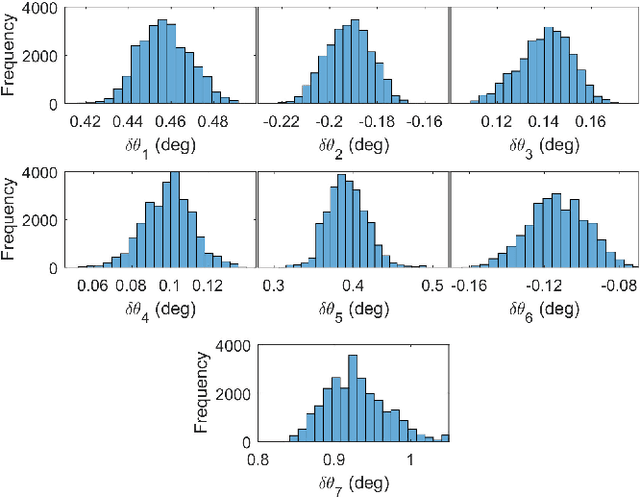
The advancement of simulation-assisted robot programming, automation of high-tolerance assembly operations, and improvement of real-world performance engender a need for positionally accurate robots. Despite tight machining tolerances, good mechanical design, and careful assembly, robotic arms typically exhibit average Cartesian positioning errors of several millimeters. Fortunately, the vast majority of this error can be removed in software by proper calibration of the so-called "zero-offsets" of a robot's joints. This research developed an automated, inexpensive, highly portable, in situ calibration method that fine tunes these kinematic parameters, thereby, improving a robot's average positioning accuracy four-fold throughout its workspace. In particular, a prospective low-cost motion capture system and a benchmark laser tracker were used as reference sensors for robot calibration. Bayesian inference produced optimized zero-offset parameters alongside their uncertainty for data from both reference sensors. Relative and absolute accuracy metrics were proposed and applied for quantifying robot positioning accuracy. Uncertainty analysis of a validated, probabilistic robot model quantified the absolute positioning accuracy throughout its entire workspace. Altogether, three measures of accuracy conclusively revealed multi-fold improvement in the positioning accuracy of the robotic arm. Bayesian inference on motion capture data yielded zero-offsets and accuracy calculations comparable to those derived from laser tracker data, ultimately proving this method's viability towards robot calibration.
Slip Detection: Analysis and Calibration of Univariate Tactile Signals
Jun 27, 2018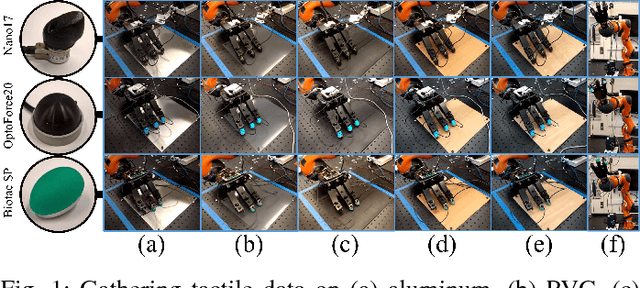
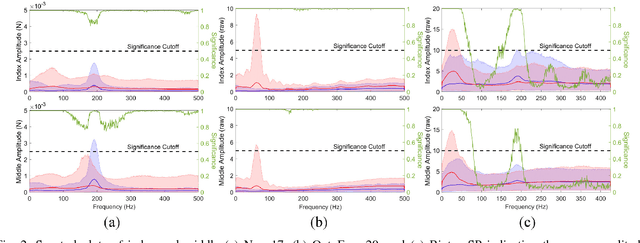
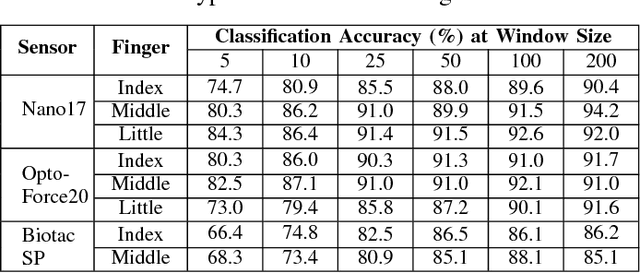
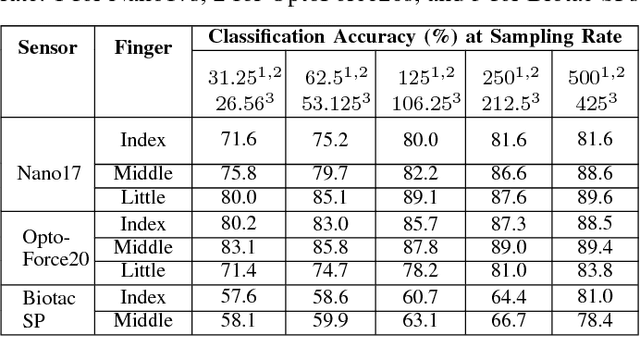
The existence of tactile afferents sensitive to slip-related mechanical transients in the human hand augments the robustness of grasping through secondary force modulation protocols. Despite this knowledge and the fact that tactile-based slip detection has been researched for decades, robust slip detection is still not an out-of-the-box capability for any commercially available tactile sensor. This research seeks to bridge this gap with a comprehensive study addressing several aspects of slip detection. Key developments include a systematic data collection process yielding millions of sensory data points, the generalized conversion of multivariate-to-univariate sensor output, an insightful spectral analysis of the univariate sensor outputs, and the application of Long Short-Term Memory (LSTM) neural networks on the univariate signals to produce robust slip detectors from three commercially available sensors capable of tactile sensing. The sensing elements underlying these sensors vary in quantity, spatial arrangement, and mechanics, leveraging principles in electro-mechanical resistance, optics, and hydro-acoustics. Critically, slip detection performance of the tactile technologies is quantified through a measurement methodology that unveils the effects of data window size, sampling rate, material type, slip speed, and sensor manufacturing variability. Results indicate that the investigated commercial tactile sensors are inherently capable of high-quality slip detection.
Multi-Fingered Robotic Grasping: A Primer
Jul 22, 2016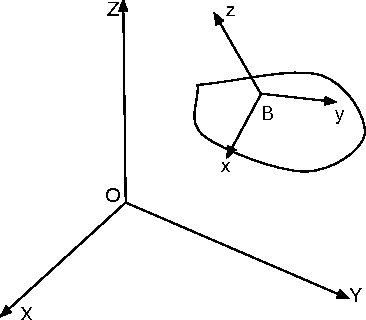
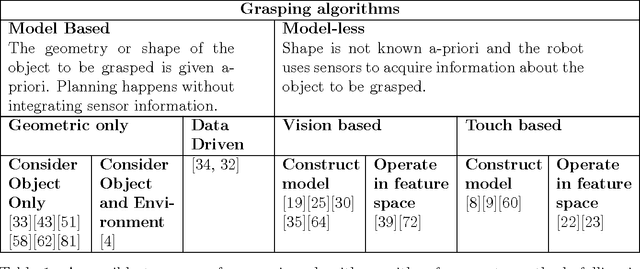
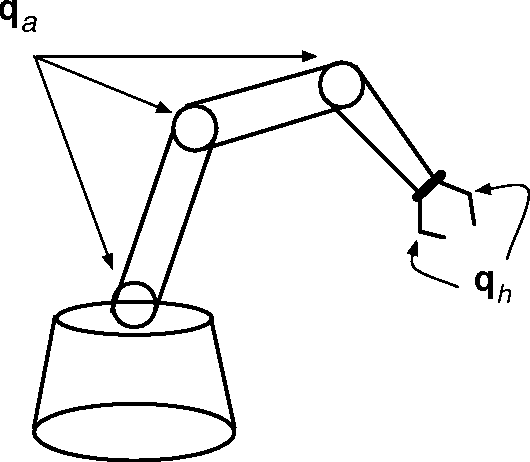
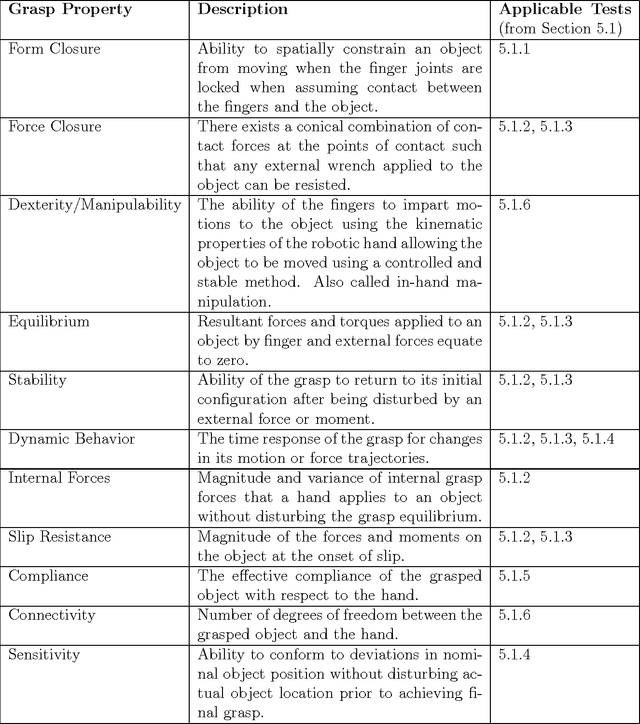
This technical report presents an introduction to different aspects of multi-fingered robot grasping. After having introduced relevant mathematical background for modeling, form and force closure are discussed. Next, we present an overview of various grasp planning algorithms with the objective of illustrating different approaches to solve this problem. Finally, we discuss grasp performance benchmarking.