Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Fingered Robotic Grasping: A Primer
Paper and Code
Jul 22, 2016
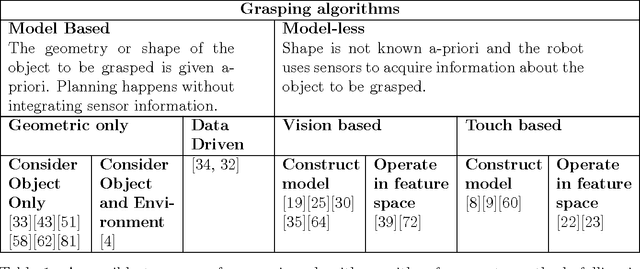
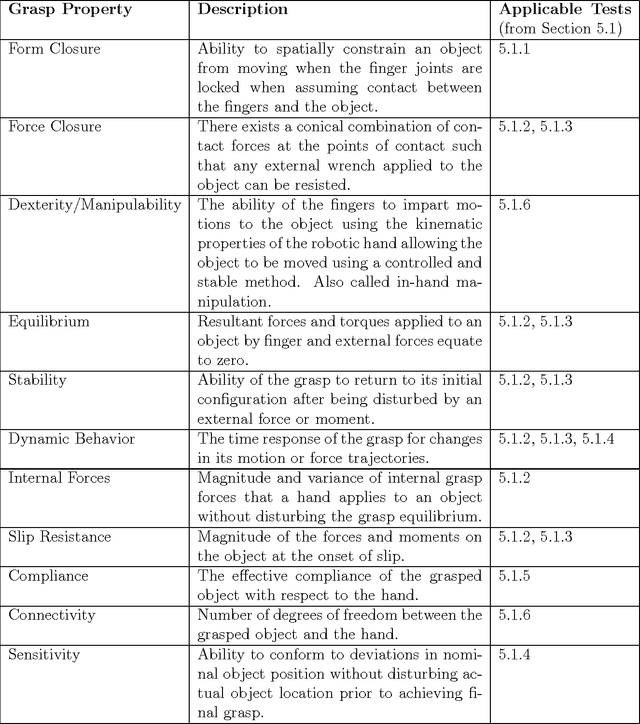
This technical report presents an introduction to different aspects of multi-fingered robot grasping. After having introduced relevant mathematical background for modeling, form and force closure are discussed. Next, we present an overview of various grasp planning algorithms with the objective of illustrating different approaches to solve this problem. Finally, we discuss grasp performance benchmarking.
View paper on