Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLASH WRIST -- A hardware to increase the capability of CLASH fruit gripper to use environment constraints exploration
Paper and Code
Apr 02, 2020
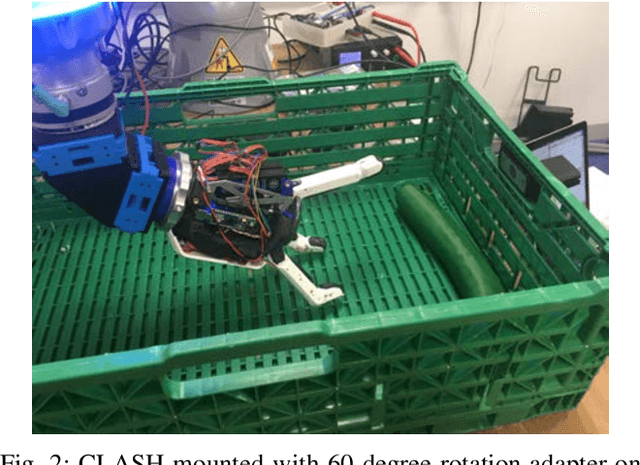

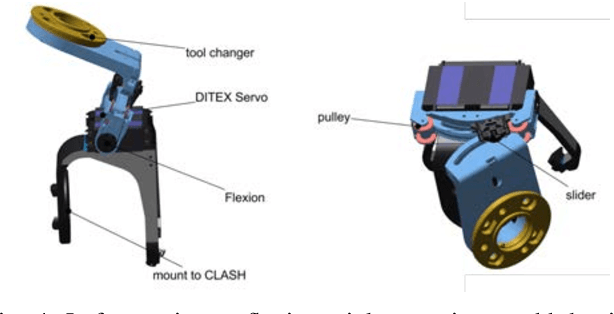
Humans use environmental constraints (EC) in manipulation to compensate for uncertainties in their world model. The same principle was recently applied to robotics, so that soft underactuated hands improve their grasping capability by using environmental constraints exploitation (ECE) [1]. Due to orientation of the robotic hand for example in the EC wall grasp, the length of the robot wrist plus the hand length gets quite important, if objects are grasp out of a box [2] . Most of the modern cobots have quite long wrist, so we have constructed a two degree of freedom wrist for the CLASH [3], to solve this problem (Fig. 1).
* IROS 2019, Factory of the Future
View paper on